Principes et définitions des moteurs à courant alternatif
Machines à courant alternatif 1955
Un moteur à courant alternatif est une machine servant à transformer l'énergie électrique en énergie mécanique.
C'est là une définition bien générale car les moteurs modernes doivent transformer cette énergie électrique de manière à satisfaire aux diverses exigences de l'industrie moderne.
Le champ d'application de la commande électrique des machines est très vaste et pose des problèmes des plus variés, à solutions très simples, mais aussi, parfois, très compliquées.
On dispose de nombreux genres de moteurs et d'organes de commande ; pour chaque application le problème consiste à choisir le moteur qui répond le mieux aux exigences de la machine qu'il commande afin de pousser la production au maximum.
Champs magnétiques tournants
Les champs magnétiques tournants sont à la base de la plupart des moteurs à courant alternatif. Grâce à eux, on fabrique des moteurs de construction simple si répandus dans l'industrie.
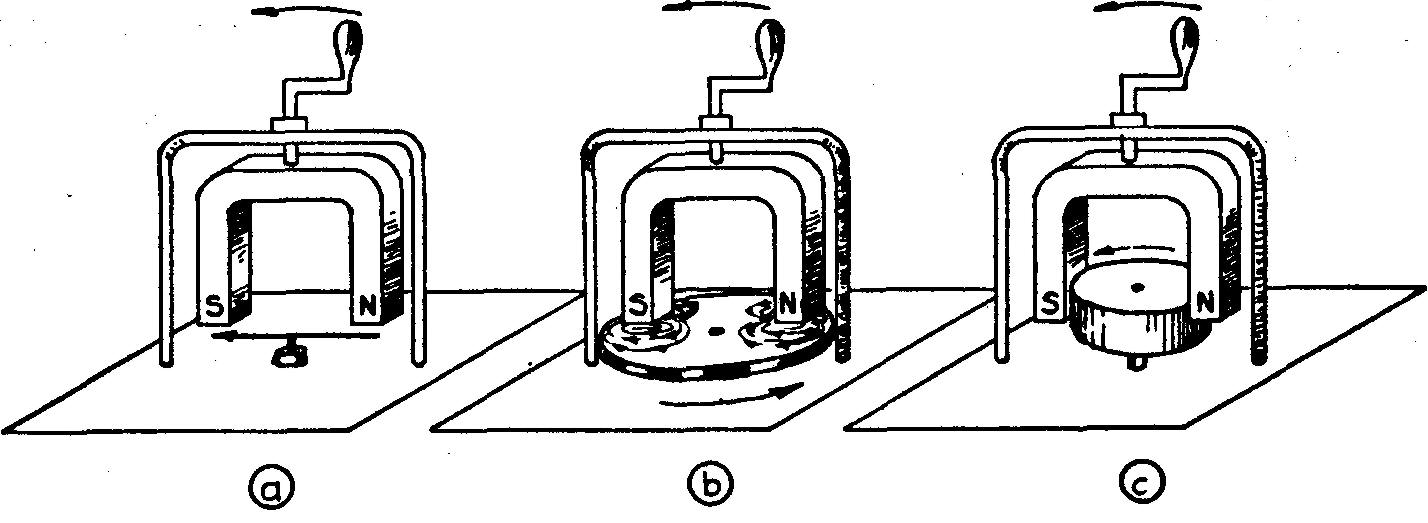
Lorsqu'on imprime un mouvement de rotation à l'aimant de la figure 46a, le champ magnétique de celui-ci tourne dans l'espace: on l'appelle champ tournant.
L'aimant en mouvement entraîne une boussole qui tourne à la même vitesse et dans le même sens que le champ tournant. La vitesse de rotation de la boussole étant en unisson ou synchronisée avec celle du champ tournant, on dit que la boussole tourne à vitesse synchrone.
À la figure 46b, un disque de cuivre monté sur un pivot remplace la boussole.
Fig. 46. — Champ magnétique tournant
Le flux magnétique de l'aimant traverse le disque et, en faisant tourner l'aimant sous l'influence du champ tournant, le disque subit des variations de flux magnétique.
Il s'induit dans sa masse des courants qui produisent des champs électromagnétiques réagissant sur le champ tournant et le couple moteur résultant fait tourner le disque dans le même sens que celui du champ tournant mais à une vitesse inférieure à celle du champ tournant.
En remplaçant le disque par un rotor cylindrique (Fig. 46c) et en faisant tourner l'aimant, le rotor tourne comme le disque.
Les expériences précédentes démontrent qu'un champ magnétique tournant, par induction électromagnétique, fait tourner une boussole, un disque ou un rotor métallique.
Ce champ tournant ne s'avère pas très pratique car pour le produire il faut qu'un moteur fasse tourner l'aimant ; mais, grâce aux courants polyphasés, on produit des champs magnétiques tournants en alimentant un stator avec un enroulement approprié tel qu'on le verra plus loin.
a) Champ magnétique tournant à courant polyphasé
Une des propriétés fondamentales des courants alternatifs polyphasés est la production de champs magnétiques tournants qui permettent d'utiliser des moteurs à courant polyphasé d'induction de construction très simple.
Pour obtenir des champs magnétiques tournants, il faut deux ou trois courants alternatifs industriels ayant un certain déphasage entre eux et un inducteur ou stator avec deux ou trois enroulements (phases) reliés de façon à produire un champ tournant et construit selon les règles de bobinage étudiées plus loin.
b) Champ magnétique tournant à courant diphasé
La figure 47 représente un graphique de deux courants diphasés ayant un déphasage 90°, un inducteur diphasé bipolaire à pôles saillants ainsi que les champs magnétiques conformes aux différentes valeurs d'intensité des courants.
Fig. 47. — Champ magnétique tournant à courant diphasé
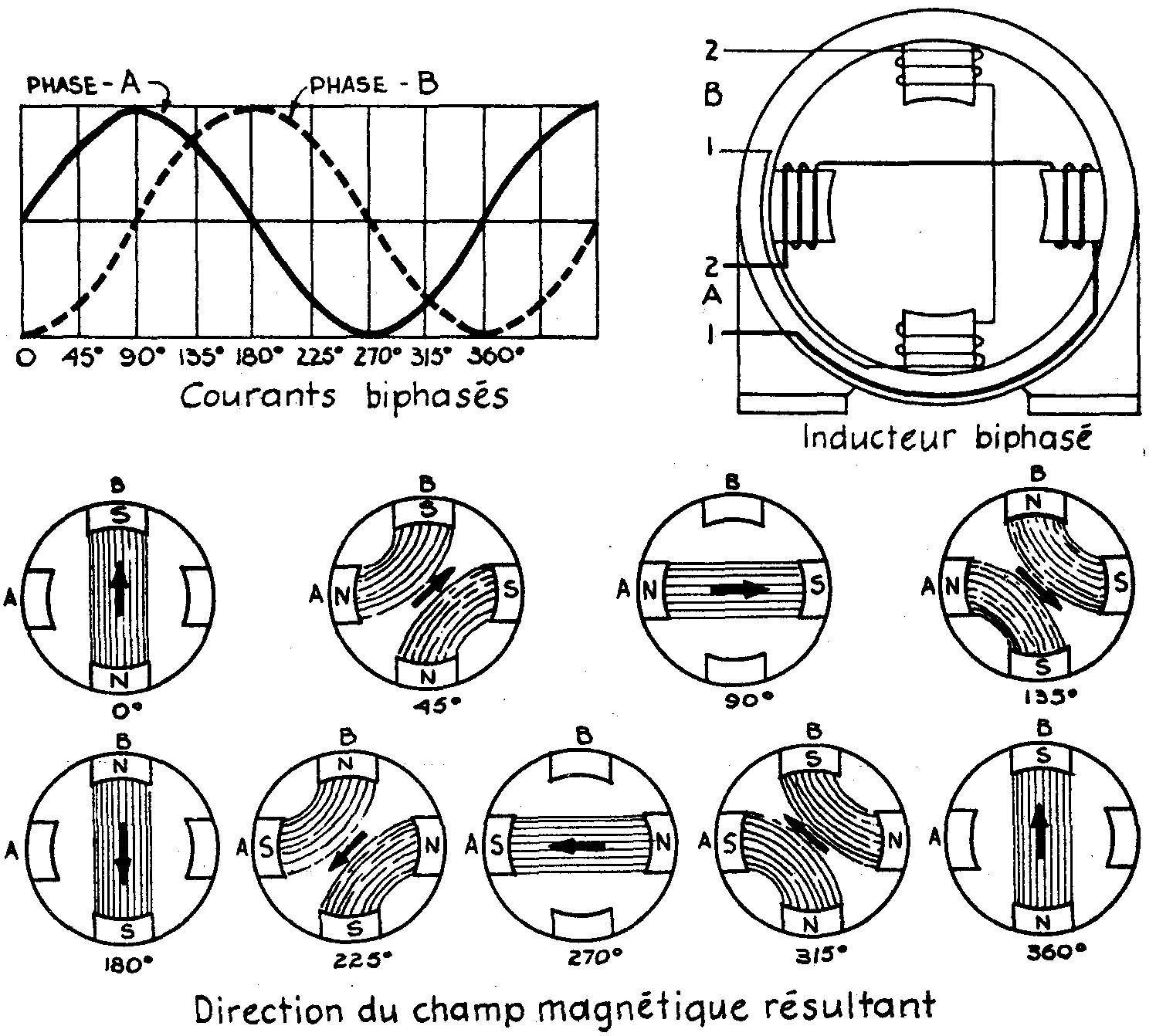
Pour chaque phase et chaque valeur d'intensité avec une courbe au-dessus de l'horizontale, la polarité est positive et le courant entre par le fil 1, parcourt l'enroulement et sort par le fil 2.
Si la courbe est au-dessous de l'horizontale, la polarité est négative; alors le courant entre par le fil 2, parcourt l'enroulement et sort par le fil 1.
Ainsi à 0°, l'intensité du courant de la phase A est nulle, celle de la phase B est négative et maximum. Le courant entre par le fil 2 parcourt l'enroulement B et sort par le fil 1. Il produit un sud à la partie supérieure de l'inducteur et un nord à la partie inférieure; la boussole prend la position indiquée.
A 45°, l'intensité du courant de la phase B a diminué mais il y a encore un sud en haut et un nord en bas de l'inducteur.
En même temps l'intensité du courant de la phase A augmente et atteint la valeur positive indiquée a 45°. La polarité étant positive, le courant entre par le fil 1 parcourt l'enroulement A et sort par le fil 2 et produit un nord à gauche et un sud à droite de l'inducteur.
Le champ résultant est tel qu'indiqué et l'aiguille aimantée a tourné une fraction de tour.
En étudiant le parcours des courants et le champ magnétique résultant pour chacune des valeurs des intensités, on constate qu'on obtient un champ magnétique tournant dans le sens des aiguilles d'une montre et entraînant la boussole.
c) Champ magnétique tournant à courant triphasé
La partie supérieure de la figure 48 est la représentation graphique de trois courants triphasés, déphasés l'un de l'autre de 120°.
Au centre, on voit un stator à courant triphasé bipolaire à trois bobines reliées en étoile par la méthode des pôles conséquents.
Fig. 48. — Champ magnétique tournant à courant triphasé
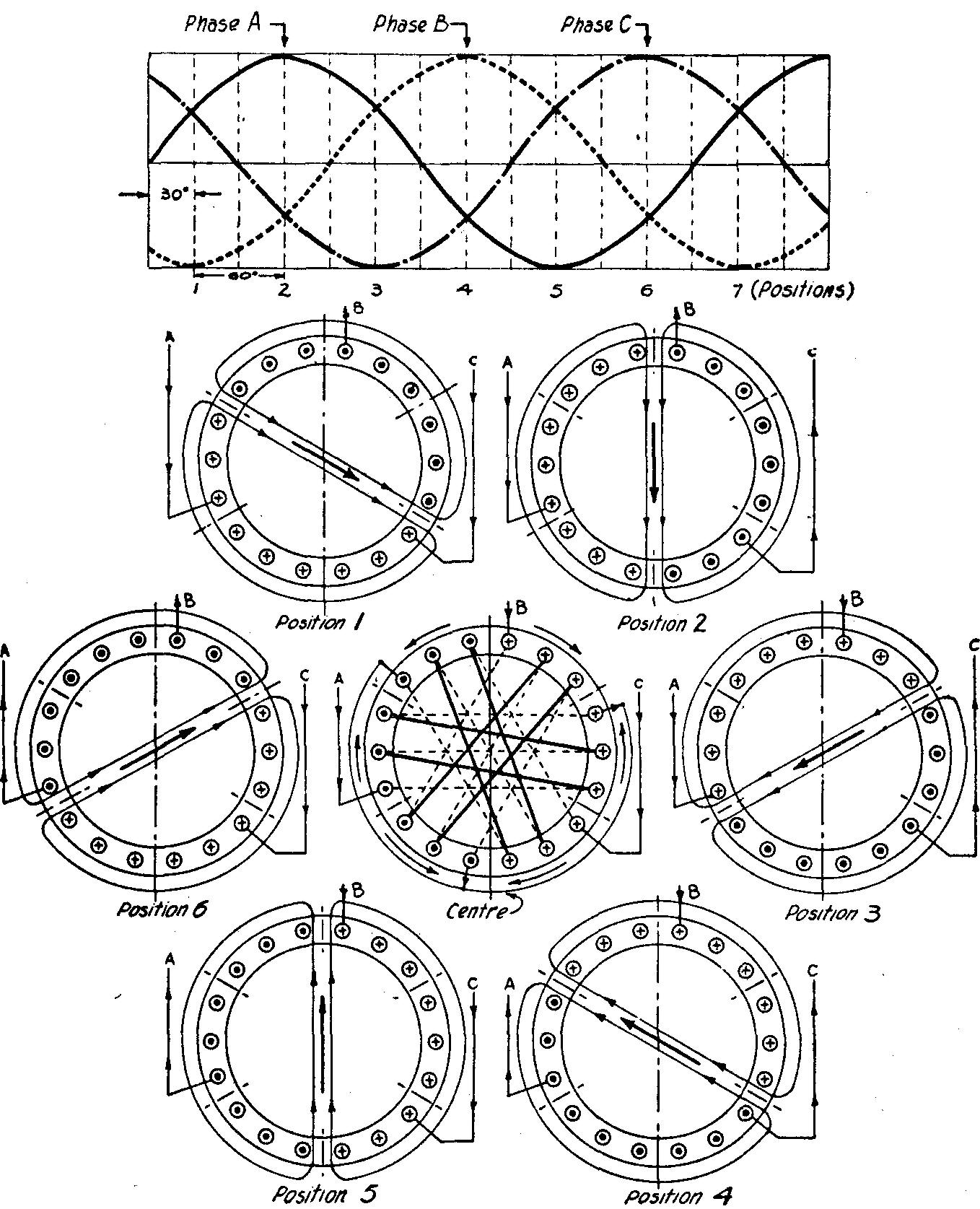
Sur le graphique, les courants des phases A, B ou C lorsqu'il sont positifs entrent par les fils A, B ou C du stator et se dirigent vers le centre de l'enroulement.
Lorsque ces courants sont négatifs, ils circulent dans le sens opposé, c'est-à-dire vers la source.
Ainsi à la position 1, les courants des phases A et C sont positifs et se dirigent vers le centre de l'enroulement tandis que le courant de la phase B est négatif et se dirige vers la source.
Le champ magnétique résultant est tel qu'indiqué. A la position 2 sur le graphique A est positif et B et C sont négatifs.
Dans le stator le courant de A se dirige vers le centre et les courants de B et de C, vers la source. Le champ résultant est tel qu'indiqué.
En étudiant de cette manière le parcours des courants dans le stator et le champ magnétique résultant pour chacune des valeurs successives ou suivantes des intensités, on constate qu'on obtient un champ magnétique qui tourne dans le sens des aiguilles d'une montre et entraîne la boussole.
Un champ magnétique tournant entraîne n'importe quel objet métallique libre, de grosseur appropriée et placé dans son milieu.
Ainsi, au centre d'un stator à courant triphasé, alimenté à tension réduite, on place une boîte cylindrique montée sur un arbre. Le champ tournant entraîne cette boîte et tourne comme le rotor d'un moteur.
On remplace la boîte par un roulement à billes; en maintenant fixe la couronne intérieure, la couronne extérieure tourne ; en renversant le stator sur le côte et en plaçant une boule métallique sur une assiette au milieu de l'ouverture du stator, la boule tourne.
Avec les objets précédents le couple moteur est très faible et le glissement se
révèle considérable.
Vitesse. La vitesse du champ tournant, nommée aussi
vitesse synchrone, s'obtient par la formule:
N = 120f / P
N =
révolutions par minute
f = fréquence
P = pôles.
Note: Le courant monophasé, lorsqu'appliqué à un stator ayant un enroulement simple, ne produit pas de champ tournant.
Pour obtenir un champ tournant avec un courant monophasé, on produit par différents moyens un deuxième champ magnétique ayant un certain déphasage avec le champ principal, c'est-à-dire un champ magnétique qui imite le champ magnétique tournant à courant diphasé.
À cette fin, on utilise les bobines écran, un enroulement additionnel avec résistance, une bobine de self, un condensateur, etc., (voir moteurs asynchrones à courant monophasé).
Les principaux facteurs relatifs au choix, au fonctionnement, à l'installation et au raccordement des moteurs sont:
le genre de moteur, la nature, l'intensité et la tension du courant, la fréquence, la puissance, la vitesse, le couple moteur, la réversibilité, le freinage électrique, le facteur de puissance, le rendement, le genre de service, la température et l'atmosphère ambiantes, la puissance du réseau, le genre de construction, le montage, l'accouplement, etc.
Nature du courant et de la tension. Pour la distribution générale industrielle on emploie exclusivement comme force motrice le courant triphasé.
Les tensions utilisées au Canada sont de 208, 220, 440 et de 550 volts ; la tension de 550 volts est la plus employée.
Les tensions des moteurs à courant triphasé de grande puissance sont de 1,100 à 12,000 volts.
On utilise le courant monophasé dans les moteurs de faible puissance ou- lorsqu'il n'y a pas de courant triphasé disponible comme dans les districts ruraux et résidentiels.
La tension affecte considérablement les caractéristiques d'un moteur. Ainsi le couple de démarrage et le couple maximum des moteurs d'induction varient avec le carré de la tension.
La plupart des moteurs à courant alternatif tolèrent une augmentation ou une diminution de tension de 10%. Toutefois ces variations en affectent les caractéristiques.
Il est très important que la distribution, ainsi que les conducteurs alimentant le moteur, soient de grosseur adéquate afin de réduire la baisse de tension au minimum. Lorsque le couple de démarrage ou la vitesse semblent trop faibles, on vérifie la tension aux bornes du moteur afin de repérer une baisse de tension excessive.
Fréquence
On utilise le plus souvent la fréquence de 60 cycles en Amérique du Nord. La fréquence moyenne des grands réseaux de distribution demeure constante.
La fréquence des petites centrales peut varier et, dans cette éventualité, affecte principalement la vitesse des moteurs. On peut produire des fréquences industrielles au-dessus de 60 cycles en utilisant un groupe convertisseur de fréquence.
Intensité du courant
La plaque signalétique du moteur indique l'intensité du courant de régime. Cette valeur sert de base de comparaison avec les autres valeurs du courant.
Ainsi, on dit que l'intensité du courant de démarrage est de 300% ou 3 fois l'intensité du courant de régime.
En mesurant l'intensité du courant d'un moteur en marche et à charge, on vérifie si le moteur fonctionne à faible charge, à pleine charge ou en surcharge en comparant simplement la lecture de l'ampèremètre à l'ampérage indiqué sur la plaque signalétique du moteur.
L'intensité du courant de démarrage des moteurs à courant alternatif s'élève en comparaison de l'intensité du courant de régime. Cette intensité diminue rapidement à mesure que la vitesse du rotor augmente pour devenir égale au courant de régime avec un moteur à charge normale.
Elle a une valeur beaucoup plus faible si le moteur est à vide. En marche, une augmentation de charge entraîne une augmentation d'intensité du courant.
Puissance
La puissance des moteurs s'exprime en horse-power (H.P.) On fabrique des moteurs minuscules de quelques millièmes de horse-power jusqu'aux moteurs géants de 60,000 H.P.
On mesure la puissance d'un moteur à l'aide d'une frein de Prony, d'un dynamomètre, etc.1
H.P. = 2π NT / 33000 ou = NT / 5252
N = révolutions par minute
T = couple moteur en livres-pieds.
Rendement
Le rendement (efficiency) d'un moteur est le rapport entre la puissance utile et la puissance appliquée ou absorbée.
On mesure la puissance utile avec le frein de Prony, le dynamomètre, etc. et la puissance appliquée avec le wattmètre. Le rendement pour cent est
n = H.P. x 746 x 100 / watts
Le rendement des petits moteurs d'une fraction de H.P. est faible; il augmente avec la puissance des moteurs jusqu'à une certaine limite. Le rendement d'un moteur à vide est nul ; il augmente à mesure que la charge augmente.
Il est ordinairement au maximum à charge de régime, d'où l'importance de choisir des moteurs de dimensions appropriées.
Le rendement des moteurs de moyenne et de grande puissance se calcule par le méthode des pertes séparées.
Pertes de puissance
Les pertes de puissance dans un moteur à courant alternatif sont
a) les pertes mécaniques (friction) ;
b) les pertes magnétiques (courant de Foucault et hystérésis) ;
c) les pertes électriques dues à l'effet de Joule dans les enroulements du stator et du rotor.
Facteur de puissance (power factor)
Le facteur de puissance sert à multiplier la puissance apparente pour obtenir la puissance réelle.
Le facteur de puissance d'un moteur s'obtient par les formules
f.p. = W / EI (moteur à courant monophasé)
f.p. = W / 1.7321 EI (moteur à courant triphasé)
Le facteur de puissance des moteurs synchrones excités se règle à l'unité tandis que celui des moteurs asynchrones est toujours inférieur à l'unité.
Le facteur de puissance de la plupart des moteurs asynchrones est très faible à vide; il augmente avec la charge et atteint ordinairement son maximum à charge de régime.
Couple moteur (torque)
Le couple moteur est l'effort de torsion total produit par l'action réciproque du champ inducteur et du champ induit, transmise à l'arbre du moteur.
Le couple est aussi la force tangentielle à la poulie d'un moteur. La force exercée et la longueur du levier le déterminent.
Le produit de cette force, en livres, et de sa distance perpendiculaire à l'axe, en pieds, s'appelle couple moteur et s'exprime en livres-pieds.
Couple de démarrage {starting-torque or static-torque)
Le couple de démarrage est le couple exercé par un moteur au repos au moment où on le branche sur le circuit. Le couple de démarrage doit s'adapter au couple résistant de la machine.
Couple résistant
Le couple résistant est le couple nécessaire pour entraîner ou produire le mouvement de la machine commandée par le moteur.
Couple de marche (running torque or rated torque)
Le couple de marche est le couple produit par le moteur à charge de régime.
On calcule ce couple par la formule
T = H.P. x 5252 / N
T = couple
N = révolutions par minute
Exemple
Quel est le couple de marche d'un moteur de 10 H.P. tournant à une vitesse de 1750 r.p.m. ?
f = 5252 x 10 / 1750 = 30 livres-pieds
On compare les autres valeurs du couple au couple de marche que l'on considère comme l'unité ou 100%.
Couple accélérateur (pull-up torque)
Le couple accélérateur est le couple minimum produit par le moteur pendant l'accélération ou le démarrage.
Couple d'arrêt (breakdown or stalling torque)
Le couple d'arrêt est le couple maximum que peut produire un moteur en marche; dès que le couple résistant dépasse cette valeur le moteur arrête brusquement.
Couple d'accrochage (pull-in torque)
Le couple d'accrochage d'un moteur synchrone est le couple maximum que produit un moteur synchrone au moment où il est excité, où il se synchronise ou s'accroche à tension et à excitation normales.
Couple de décrochage (pull-out torque)
Le couple de décrochage d'un moteur synchrone est le couple maximum produit par le moteur à vitesse synchrone pendant une minute. Dès que le couple résistant dépasse cette valeur le moteur perd son synchronisme ou arrête suivant le genre du moteur.
Couple maximum (maximum torque)
Le couple maximum est le couple le plus élevé que peut produire un moteur ; ce couple peut se produire au démarrage ou en marche ; tout dépend du moteur employé.
Vitesse (speed)
La vitesse des moteurs à courant alternatif, à l'exception des moteurs à collecteur à courant triphasé, à répulsion ou série, dépend de la fréquence et du nombre de pôles.
On l'obtient par la formule
N = 120 f / P
À la fréquence de 60 cycles, les vitesses des moteurs industriels d'une puissance jusqu'à 200 H.P. s'échelonnent de 600 à 3600 r.p.m. Les moteurs à basse vitesse se révèlent plus dispendieux que les moteurs à haute vitesse.
Les moteurs à grande puissance possèdent souvent une vitesse au-dessous de 600 r.p.m.
Il y a aussi des moteurs spéciaux à basse vitesse et des moteurs avec engrenages réducteurs de vitesse. Au besoin, pour plus de détails et de précisions, on cousulte les données des fabricants.
La vitesse maximum des moteurs à courant alternatif d'induction à 60 cycles est de 3600 r.p.m.
Pour obtenir des vitesses plus grandes, on augmente la fréquence à l'aide d'un groupe convertisseur de fréquence sauf pour les moteurs à collecteurs mentionnés précédemment.
La vitesse des moteurs synchrones demeure constante. Celle des moteurs d'induction à vide approche la vitesse synchrone et diminue légèrement à mesure que la charge augmente.
La vitesse d'un moteur peut être constante, variable, réglable, multiple, basse ou haute.
Glissement (slip)
Tous les moteurs asynchrones tournent à une vitesse inférieure à celle de leur champ tournant sauf les moteurs à collecteur mentionnés précédemment.
Le glissement d'un moteur asynchrone est la différence entre la vitesse synchrone de son champ tournant et la vitesse de son rotor pour une condition de charge donnée ordinairement à charge de régime.
Le glissement % est
(vitesse synchrone — vitesse du moteur) x 100 / vitesse synchrone
Lors de l'essai d'un moteur on détermine le glissement pour différentes charges.
Exemple
Quel est le pourcentage du glissement d'un moteur tétrapolaire dont la vitesse synchrone du champ tournant est de 1800 r.p.m. si la vitesse à charge de régime est de 1750 r.p.m. ?
(1800 - 1750) x 100 / 1800 = 2.7% (glissement)
Le glissement à vide d'une moteur à cage est très minime et augmente légèrement avec la charge. On règle le glissement d'un moteur à induit à bagues à l'aide du rhéostat relié dans son circuit rotorique ; une charge l'affecte beaucoup.
Le glissement d'un moteur synchrone est nul.
Les moteurs à collecteurs, à courant triphasé, à répulsion et série peuvent tourner à des vitesses au-dessus de la vitesse synchrone.
Au repos, le glissement est de 100% mais il diminue à mesure que la vitesse augmente.
Temps de démarrage
Les moteurs à courant alternatif démarrent rapidement.
Ainsi, un moteur à courant triphasé à cage de 10 H.P. à vide et branché directement au réseau, démarre en 0.1 seconde environ.
Le temps de démarrage augmente avec la puissance du moteur, l'inertie des masses mobiles de la machine et la diminution de tension au démarrage.
Types de paliers (bearings) Les paliers se divisent en
a) paliers à roulement à bille ou à rouleaux (bail and roller bearings) ;
b) paliers à douille (sleeve bearings).
Chaque moteur comprend deux flasques paliers boulonnées à la carcasse.
Afin d'éviter les répétitions dans les descriptions subséquentes de la construction des moteurs, on ne mentionne ni les flasques ni les paliers.
Genre de construction ou types de moteur
On trouve le moteur ouvert (open type),
le type fermé (totally enclosed),
le type fermé à ventilation extérieure forcée à canaux d'aspiration et refoulement d'air (enclosed separately ventilated),
le type fermé avec refroidissement à éventail (totally enclosed fan cooled),
le type anti-déflagrant (explosion-proof),
le moteur abrité (protected),
le moteur protégé des éclaboussures (splash-proof), le moteur protégé contre les gouttes d'eau (drop-proof),
le moteur avec engrenages (gear motor) et les moteurs de construction spéciale.
Pour une classification complète de tous les moteurs et des modifications que l'on peut leur apporter, il convient de référer aux catalogues des fabricants.
Genre de service
Les genres de service sont le régime constant ou continu, le régime variable ou périodique, intermittent ou discontinu et le service temporaire.
Un service continu est celui qu'une machine soutient sans interruption et sans que l'élévation de la température de ses divers organes dépasse une certaine limite.
Un service discontinu est celui qu'une machine soutient en un temps limité (5, 10, 15 minutes, etc.) sans que l'élévation de température de ses divers organes dépasse une certaine limite.
Un service cyclique est un service discontinu qui se reproduit périodiquement.
Commande électrique des machines
On distingue les trois types de commande électrique suivantes.
a) L'ancienne commande avec un seul gros moteur nécessitant de nombreuses transmissions et courroies. Vu ces inconvénients, ce procédé tend à disparaître.
b) La commande individuelle avec un moteur inséparable ou incorporé à la machine. Ce procédé à cause de ses nombreux avantages améliore le rendement et augmente ainsi la production.
c) La commande multiple où un moteur distinct actionne chacune des parties d'une machine comme la tenonneuse, la moulurière, la raboteuse, etc.
Classification des moteurs à courant alternatif
On distingue deux grandes classes de moteurs à courant alternatif
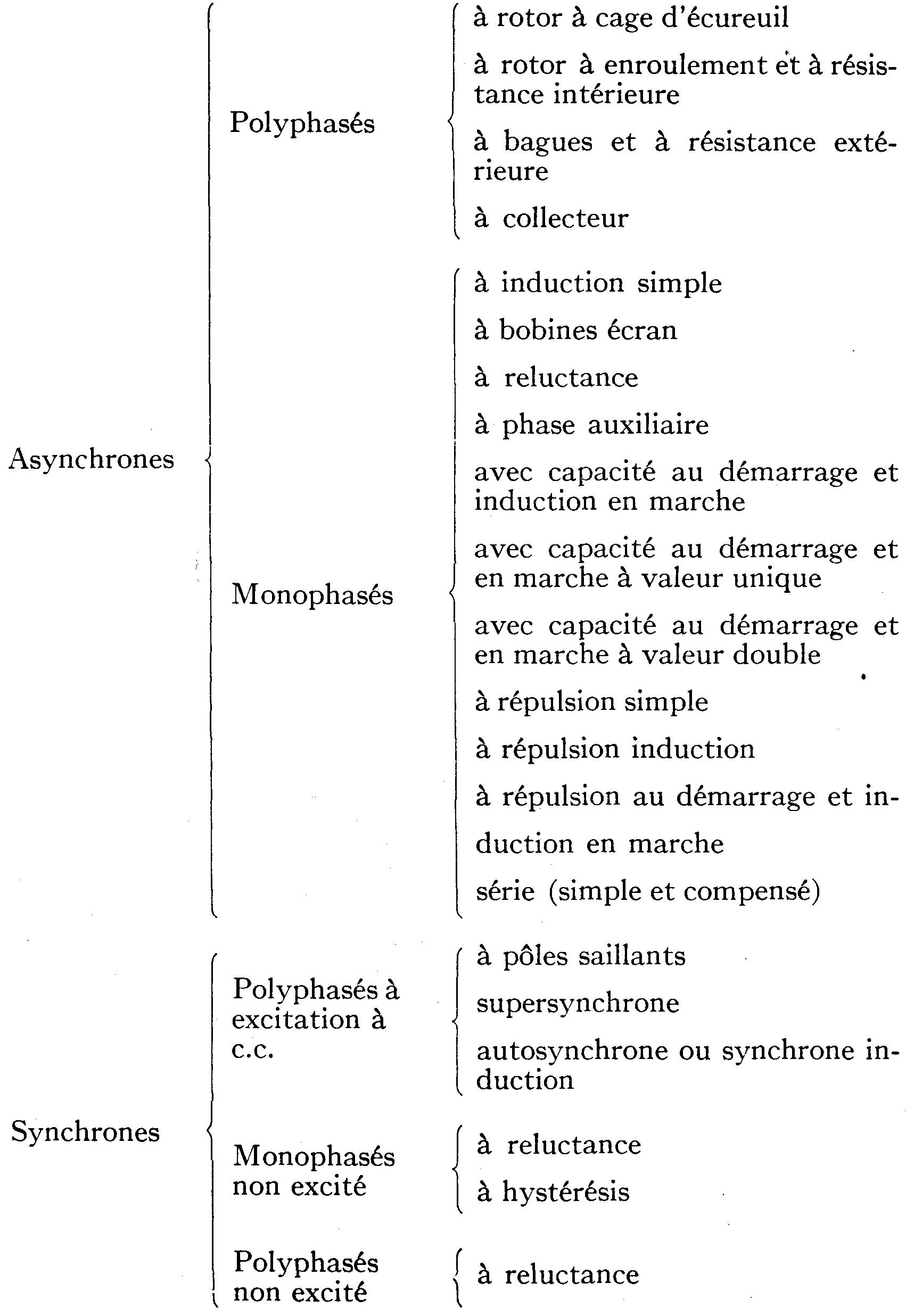

![]()