Moteurs asynchrones triphasés
Les moteurs asynchrones triphasés sont les moteurs employés le plus fréquemment dans l'industrie. Ils possèdent en effet plusieurs avantages: simplicité, robustesse, prix peu élevé et entretien facile. Vu l'importance de ces moteurs, nous leur consacrerons trois sections.
Dans cette section, nous étudierons la construction et les principes fondamentaux des moteurs asynchrones triphasés lorsqu'ils fonctionnent à fréquence fixe.
Nous développerons les équations simples qui décrivent leur fonctionnement, et nous expliquerons l'agencement des enroulements.
Dans les deux sections suivantes, nous étudierons les applications de ces machines, leur circuit équivalent et leur fonctionnement lorsqu'ils sont alimentés à fréquence variable.
Parties principales
Le moteur asynchrone triphasé (parfois appelé moteur d'induction triphasé) comprend deux parties :
le stator (fixe) et le rotor (tournant).
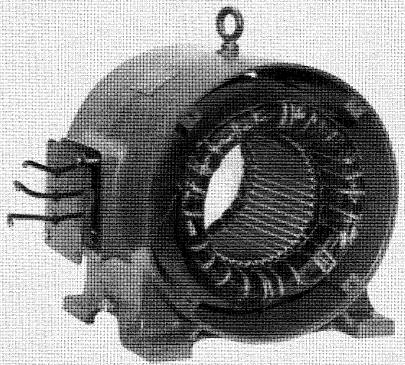
Le stator comporte une carcasse en acier renfermant un empilage de tôles identiques qui constituent un cylindre vide; ces tôles sont percées de trous à leur périphérie intérieure.
L'alignement de ces trous forme des encoches dans lesquelles on loge un bobinage triphasé (Fig. 33-1).
Figure 33-1 Vue du stator d'un moteur asynchrone triphasé à cage d'écureuil de 2 kW, 1725 r/min. Les bobines du stator sont serrées dans les 48 encoches par des cales de fibre.
Ensuite, le tout est trempé dans un vernis chaud qui pénètre jusqu'au fond des encoches et imprègne le bobinage au complet. Il en résulte une masse solide pouvant résister aux vibrations tout en offrant une bonne conduction de la chaleur vers l'extérieur de la machine. Les trois phases sont connectées en étoile et seulement trois fils sortent à l'extérieur
Le rotor se compose d'un cylindre de tôles poinçonnées à leur périphérie extérieure pour former les encoches destinées à recevoir des conducteurs. Il est séparé du stator par un entrefer très court - de l'ordre de 0,4 à 2 mm seulement.
Il existe deux types de rotors : le rotor à cage d'écureuil et le rotor bobiné.
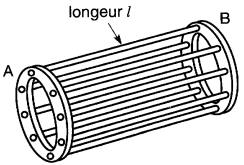
L'enroulement du rotor à cage d'écureuil (Fig. 33-2) est constitué de barres de cuivre nues introduites dans les encoches; ces barres sont soudées à chaque extrémité à deux anneaux qui les court-circuitent.
Figure 33-2 Les 52 encoches du rotor sont fermées, ce qui explique la surface lisse extérieure. Les 52 barres de cuivre sont glissées à l'intérieur des encoches puis soudées aux anneaux extérieurs. Le ventilateur de gauche sert au refroidissement du moteur et le roulement à billes de droite maintient le rotor bien centré afin qu'il ne vienne pas frotter contre le stator
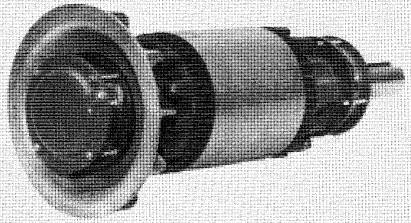
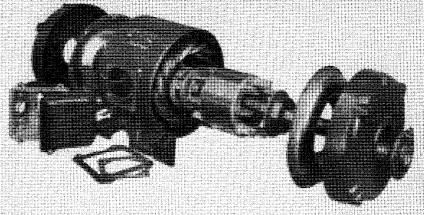
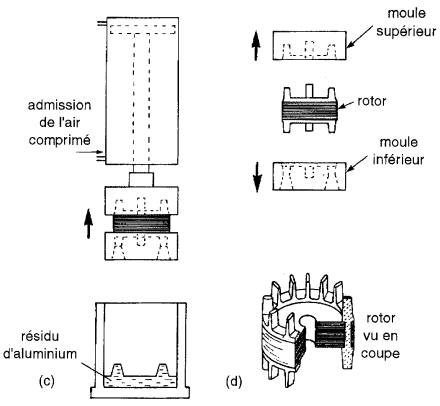
L'ensemble ressemble à une cage d'écureuil d'où le nom de rotor à cage d'écureuil, ou simplement rotor à cage. Dans les moteurs de petite et moyenne puissance, les barres et les anneaux sont formés d'un seul bloc d'aluminium coulé (Fig. 33-3).
Figure 33-3 Vue éclatée d'un moteur asynchrone dont le rotor possède une cage d'écureuil en aluminium coulé. Les anneaux coulés à chaque extrémité servent aussi de ventilateur.
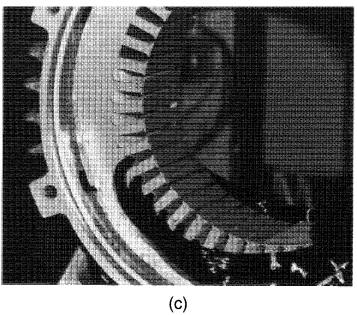
Les Fig. 33-4 et 33-5 montrent les différents stades de fabrication d'un moteur à cage d'écureuil.
Figure 33-4 Étapes de fabrication des laminations du stator et du rotor d'un moteur à cage d'écureuil.
La feuille d'acier est coupée en carré (1) ;
les coins sont arrondis et le trou de l'arbre est percé (2);
les encoches du stator sont perforées (3);
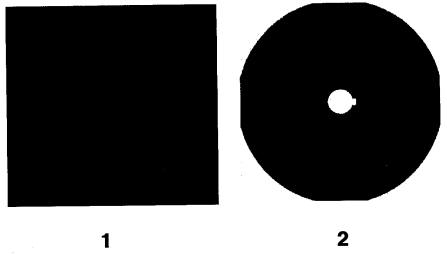
le diamètre intérieur est découpé, formant du même coup les laminations du rotor et du stator (4);
les encoches du rotor sont perforées (5).
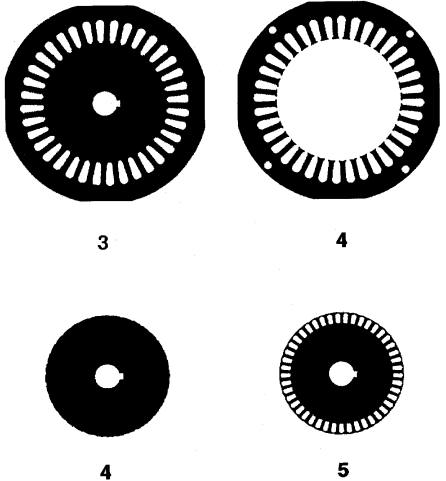
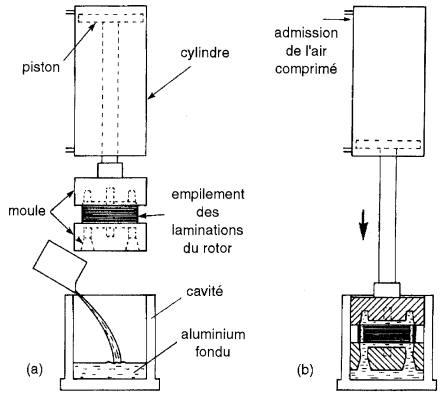
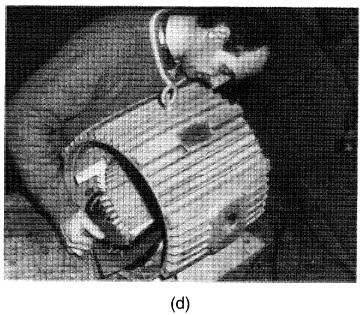
Figure 33-5 Étapes du moulage d'une cage d'écureuil :
a) On coule de l'aluminium fondu dans une cavité cylindrique. Les laminations empilées du rotor sont retenues entre deux moules.
b) Sous l'action de l'air comprimé, un piston enfonce les laminations dans la cavité. L'aluminium fondu est ainsi injecté dans les ouvertures des moules et dans les encoches du rotor.
c) Le piston remonte et retire le rotor, les moules et l'aluminium figé qu'ils contiennent d) Les moules sont enlevés, dégageant le rotor et sa cage d'écureuil.
Le rotor bobiné comprend un bobinage triphasé, semblable à celui du stator, placé dans les encoches.
Il est composé de trois enroulements raccordés en étoile ; l'extrémité libre de chaque enroulement est reliée à une bague tournant avec l'arbre (Fig. 33-6).
Figure 33-6
a) Vue éclatée d'un moteur asynchrone à rotor bobiné de 5 kW, 1730 r/min.
b) Vue agrandie des bagues du rotor

Ces bagues permettent, par l'intermédiaire de trois balais, d'insérer une résistance extérieure en série avec chacun des trois enroulements lors du démarrage du moteur.
En fonctionnement normal, les trois balais sont court-circuités.
Principe de fonctionnement du moteur asynchrone Le fonctionnement du moteur asynchrone triphasé est basé sur l'application des principes I, II et III de l'électromagnétisme.
On peut le comprendre à l'aide de l'exemple suivant.
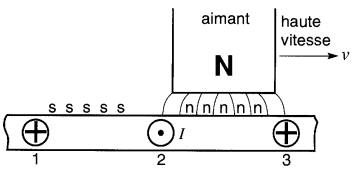
Considérons une série de conducteurs de longueur l dont les extrémités sont court-circuitées par deux barres conductrices A et B (Fig. 33-7).
Figure 33-7 Un aimant permanent qui se déplace vers la droite tend à entraîner l'échelle conductrice
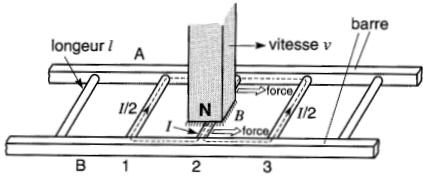
Un aimant permanent, placé au-dessus de cette «échelle», se déplace rapidement vers la droite à une vitesse v, de sorte que son champ magnétique B coupe les conducteurs à tour de rôle.
D'après le principe III, une tension E = Blv est induite dans chacun des conducteurs coupé par le champ.
D'autre part, puisque le circuit est fermé par les barres et les autres conducteurs, un courant I se met à circuler dans le conducteur qui est momentanément en dessous de l'aimant (Fig. 33-7).
Ce courant traverse le champ magnétique de l'aimant permanent, de sorte que, d'après le principe II, le conducteur est soumis à une force mécanique. Cette force agit toujours dans une direction telle qu'elle entraîne le conducteur dans le sens de déplacement du champ.
Si «l'échelle» de conducteurs était libre de se déplacer, elle accélérerait vers la droite.
Cependant, à mesure qu'elle gagne de la vitesse, la «coupure» des conducteurs par le champ magnétique se fait moins rapidement et la tension induite diminue, de même que le courant I.
Par conséquent, la force agissant sur les conducteurs situés en dessous de l'aimant diminue.
Si l'échelle se déplaçait à la même vitesse que le champ, la tension induite, le courant I et la force deviendraient nuls. Dans le moteur asynchrone, l'échelle est recourbée sur elle-même pour former une cage d'écureuil (Fig. 33-8) et l'aimant est remplacé par un champ tournant qui coupe les conducteurs du rotor.
Figure 33-8 Une échelle conductrice recourbée sur elle-même forme une cage d'écureuil
Ce champ tournant est créé par l'ensemble des courants triphasés circulant dans les trois enroulements du stator.
Champ tournant
Considérons un stator élémentaire comportant 6 pôles saillants et bobiné de la façon indiquée à la Fig. 33-9.
Figure 33-9 Stator élémentaire dont les enroulements sont connectés en étoile. Les bornes A, B, C sont raccordées à une source triphasée (pas montrée)
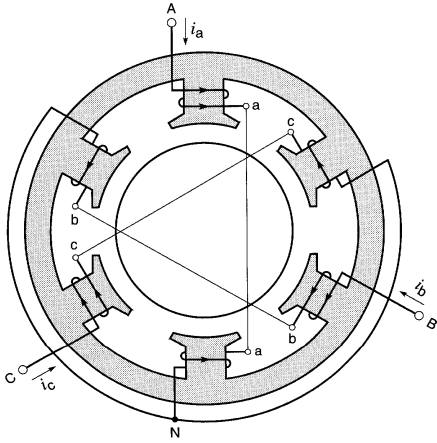
Trois enroulements identiques Aa-aN, Bb-bN et Cc-cN, composés de 2 bobines en série (pôles nord et sud), sont disposés à 120° l'un de l'autre dans l'espace.
Les extrémités N sont reliées pour former un montage en étoile.
À cause de la symétrie parfaite des enroulements, les impédances entre les bornes A, B, C et le neutre N sont identiques.
Les trois bobines dont les bornes sont A, B, C constituent donc une charge triphasée équilibrée. Par conséquent, si l'on applique une source de tension triphasée aux bornes A, B et C, des courants alternatifs identiques Ia, Ib et Ic déphasés de 120° dans le temps traversent les bobines (Fig. 33-10).
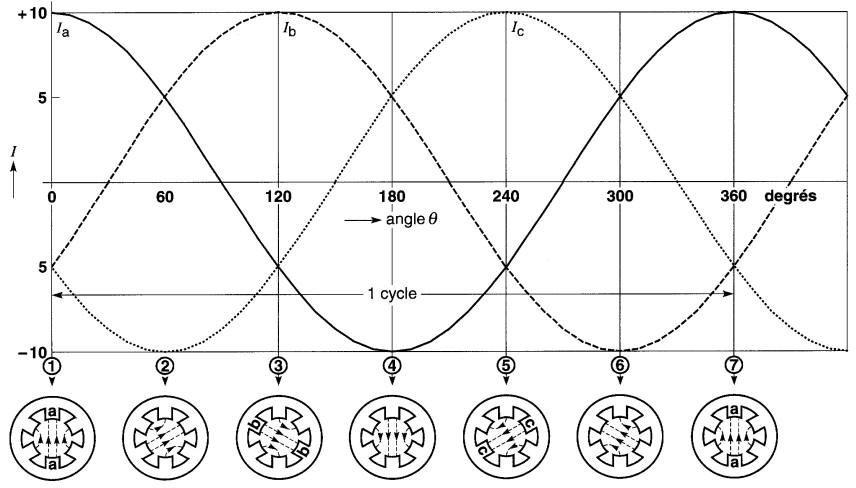
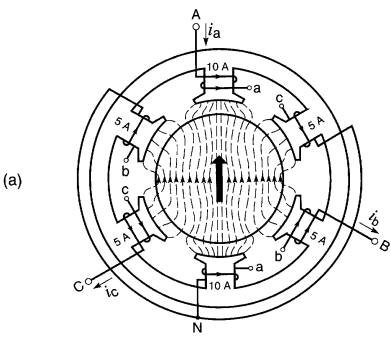
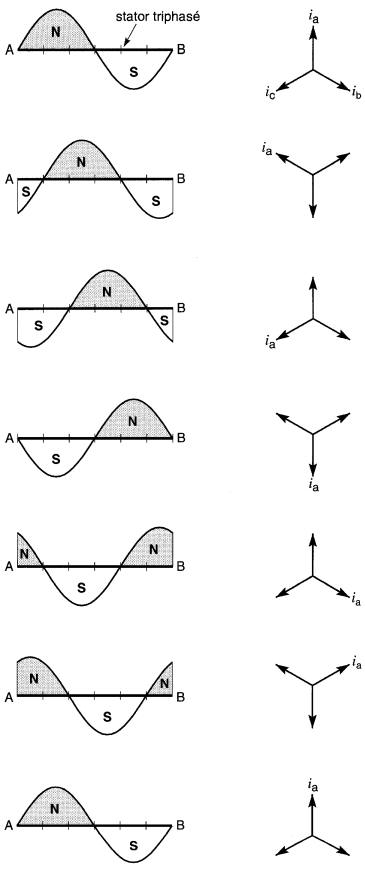
Figure 33-10 Courants instantanés circulant dans les enroulements de la figure 33-9, et position correspondante du champ magnétique
Ces courants produisent des forces magnétomotrices qui engendrent des flux. Ce sont les flux qui nous intéressent. Afin de suivre la séquence des événements, nous supposons que les courants sont positifs lorsqu'ils circulent d'une ligne vers le neutre N.
Un courant négatif circule donc du neutre vers la ligne. Supposons que chaque bobine possède 5 spires et que le courant crête par phase soit de 10 A.
Ainsi, lorsque Ia = +7 A, les deux bobines de la phase A produisent ensemble une FMM de 7 A x 10 spires = 70 A et un flux d'une valeur correspondante.
Puisque le courant est positif, il produit un flux qui se dirige verticalement vers le haut, d'après la règle de la main droite.
En observant, à différents instants, la valeur et le sens du courant dans chacune des bobines, on peut établir les directions successives du champ magnétique résultant (Fig. 33-10).
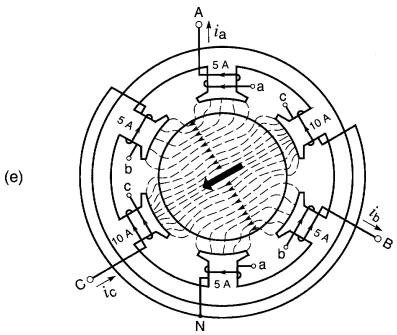
À l'instant 1, par exemple, le courant Ia a une valeur de +10 A alors que les courants Ib et le ont chacun -5 A.
La FMM de la phase A vaut alors: 10 A x 10 = 100 A; celles des phases B et C, 50 A chacune. La direction du flux étant imposée par le sens des courants, le champ doit avoir l'allure indiquée à la Fig. 33-11a.
Figure 33-11
a. Champ magnétique à l'instant 1 ; l'orientation est verticale
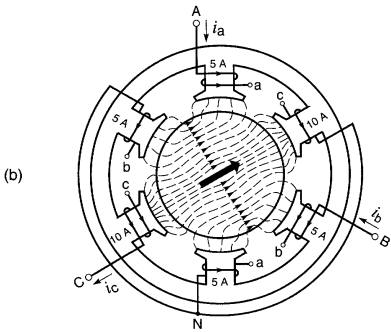
b. Le champ magnétique à l'instant 2 est identique à celui de l'instant 1, sauf qu'il a tourné d'un angle de 60°.
c. Champ magnétique à l'instant 3.
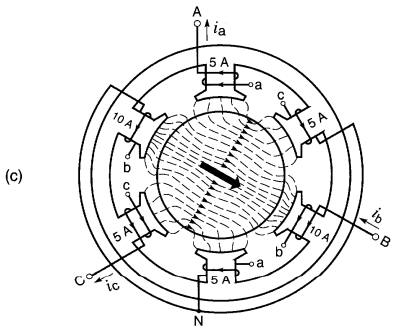
d. Champ magnétique à l'instant 4.
e. Champ magnétique à l'instant 5
f. Champ magnétique à l'instant 6. Le flux a exécuté 5/6 de tour depuis l'instant 1.
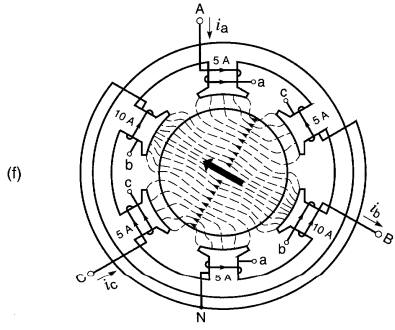
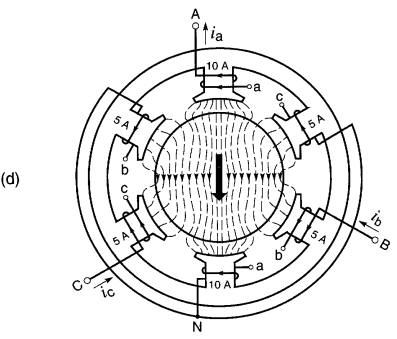
On remarque que les six pôles produisent un champ résultant qui équivaut à celui que donneraient un seul pôle nord et un seul pôle sud.
À l'instant 2, soit un sixième de cycle plus tard, le courant le atteint sa valeur crête de -10 A, tandis que les valeurs Ia et Ib sont de +5 A chacune (voir Fig. 33-10).
Comme précédemment, on détermine la valeur des FMM et l'on constate que le champ garde la même allure, sauf qu'il s'est déplacé (dans l'espace) d'un angle de 60°.
En d'autres termes, le flux a effectué 1/6 de tour entre les instants 1 et 2.
En procédant ainsi pour chacun des instants 3, 4, 5, 6 et 7, séparés par des intervalles de 1/6 de cycle, on constate que le champ résultant exécute un tour complet pendant un cycle (Fig. 33-11a à 33-11f).
La vitesse de rotation du champ dépend donc de la fréquence de la source qui alimente le moteur.
Si la fréquence des courants est de 60 Hz, le champ fait un tour complet en 1/60 s, ce qui équivaut à 60 tours par seconde ou 3600 tours en une minute.
Par contre, si la fréquence est de 5 Hz, le champ effectue un tour en 1/5 s, ce qui donne une vitesse de rotation de 300 r/min seulement.
Puisque la vitesse de rotation du champ est forcément synchronisée avec la fréquence du réseau, on l'appelle vitesse synchrone.
Sens de rotation
Les valeurs maximales des courants de la Fig. 33-10 se succèdent dans l'ordre A-B-C. On observe que, pour une telle séquence des phases, le champ tourne dans le sens horaire.
Si l'on intervertit deux des fils de ligne alimentant le stator, la nouvelle séquence sera A-C-B. En suivant un raisonnement analogue à celui de la section Champ tournant, on constaterait que le champ tourne à la vitesse synchrone dans le sens antihoraire, ce qui change le sens de rotation du moteur.
Nombre de pôles - vitesse synchrone
Les stators des anciennes machines avaient des pôles saillants, mais les stators modernes sont lisses. Ainsi, le stator de la Fig. 33-9 est plutôt construit comme celui montré à la Fig. 33-12.
Les deux bobines originales Aa et aN constituent alors ce qu'on appelle les groupes 1 et 2 de la phase A (Fig. 33-12a).
Figure 33-12a Le groupe 1 de la phase A est composé de 5 bobines réparties dans les encoches du stator. Les bobines sont raccordées en série.
Le groupe 2 est identique au groupe 1. Les deux groupes produisent un pôle N et un pôle S lorsque le courant circule dans les bobines. On montre en lignes pointillées le spectre du champ créé par la phase A
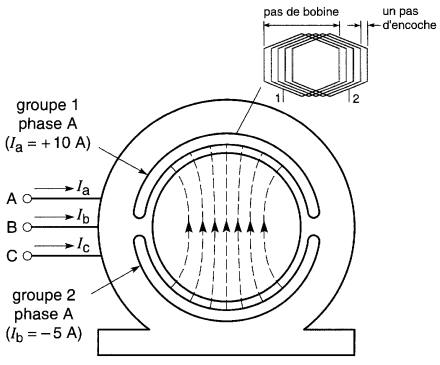
Un groupe est donc équivalent à un pôle saillant. Chaque groupe est composé de 2, 3 ou plusieurs bobines disposées dans des encoches successives et raccordées en série.
Par exemple, le groupe 1 de la Fig. 33-12a est composé de 5 bobines distribuées dans 10 encoches. Les cinq bobines ensemble constituent un pôle.
De la même façon, les cinq bobines du groupe 2 constituent un pôle. Lorsque le courant Ia circule dans les deux groupes, il produit le flux montré dans la Fig. 33-12a.
Les groupes des deux autres phases sont identiques à ceux de la phase A, mais ils sont disposés à 120° l'un de l'autre (Fig. 33-12b).
Figure 33-12b Stator bipolaire montrant la disposition des groupes des trois phases. Le champ magnétique résultant correspond à l'instant où Ia = + 10A et Ib = Ic = -5A.
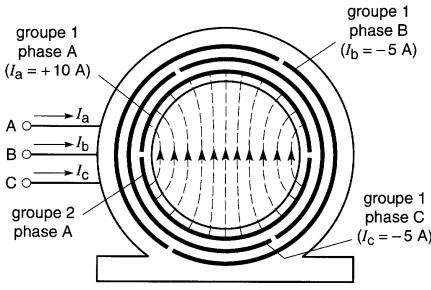
Le champ créé par l'ensemble des trois phases forme encore 2 pôles (Fig. 33-12b).
Lorsque les enroulements d'un stator sont arrangés pour former 2 pôles par phase (6 pôles en tout), on obtient un champ tournant bipolaire. En disposant plusieurs groupes de pôles sur le stator, on obtient un spectre magnétique multipolaire.
Ainsi, une machine triphasée ayant 8 groupes par phase (soit 24 groupes au total) produit un champ tournant à 8 pôles ; on l'appelle alors machine à 8 pôles (Fig. 33-13).
Figure 33-13 Stator triphasé à 8 pôles et champ magnétique résultant à l'instant où Ia = + 10 A et Ib = Ic = -5 A.
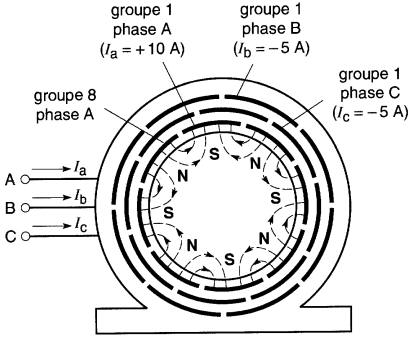
Le nombre de pôles du champ tournant est toujours égal au nombre de groupes par phase.
Pour une même fréquence d'alimentation, la vitesse de rotation d'un champ multipolaire est inférieure à celle d'un champ bipolaire.
On a vu que, pour une machine bipolaire, le champ tournant exécute un tour pendant un cycle.
On peut démontrer que dans une machine à 8 pôles, le champ exécute 1/4 de tour seulement pendant 1 cycle. Sur un réseau à 60 Hz, la vitesse synchrone est alors 1/4 de tour par 1/60 s, ou 900 r/min.
Les 8 pôles de la Fig. 33-13 produisent un spectre magnétique qui ressemble à une roue à 8 rayons, tournant à une vitesse de 900 r/min. La vitesse de rotation du champ dépend donc de la fréquence de la source et du nombre de pôles du stator.
Sa valeur est donnée par la formule:
ns = 120f / P (33-1)
où
ns
=
vitesse synchrone, en tours par minute [r/min]
f = fréquence de la source, en hertz [Hz]
p = nombre de pôles par phase
Lorsqu'on donne le nombre de paires de pôles p', la formule devient ns = 60f / p'.
Cette expression indique que la vitesse synchrone augmente avec la fréquence, mais diminue avec le nombre de pôles. Le nombre de pôles est toujours un chiffre pair car un pôle N est toujours accompagné d'un pôle S.
Exemple 33-1
Un moteur asynchrone possédant 20 pôles par phase est alimenté par une source triphasée à 50 Hz.
Calculer la vitesse synchrone.
Solution
La valeur de la vitesse synchrone est:
ns = 120f / p = 120 x 50 / 20 = 300 r/min
Démarrage du moteur à cage d'écureuil
Au moment où l'on ferme l'interrupteur pour brancher les enroulements du stator d'un moteur asynchrone sur une ligne triphasée, le rotor à cage est encore au repos. Le champ tournant qui provient du stator coupe les conducteurs du rotor et il engendre une tension dans ceux-ci.
Cette tension est alternative, car les conducteurs sont tantôt devant un pôle nord, tantôt devant un pôle sud du champ tournant. La fréquence de la tension dépend du nombre de pôles N et S passant devant un conducteur en une seconde; lorsque le rotor est au repos, elle est toujours égale à la fréquence du réseau.
Les conducteurs étant court-circuités à leurs extrémités par les deux anneaux, la tension induite fait circuler des courants. La résistance et l'inductance offertes par la cage sont très faibles et les courants sont intenses: quelques centaines d'ampères pour les machines de moyenne puissance.
Les mêmes conducteurs du rotor portant ces courants se trouvent toujours dans le chemin du flux provenant du stator; ils sont alors soumis à des forces électromagnétiques considérables. Les forces ainsi produites tendent à entraîner le rotor dans le sens de rotation du champ.
Pour résumer:
1. les tensions d'un système triphasé appliquées au stator d'un moteur asynchrone y produisent des courants triphasés;
2. les courants produisent un champ tournant (principe I); 3. le champ tournant induit une tension dans les barres du rotor (principe III);
4. la tension induite donne naissance à des courants intenses dans les barres ;
5. les barres portant un courant, et situées dans un champ magnétique, sont soumises à des forces électromagnétiques (principe II) ;
6. les forces tendent à entraîner le rotor dans le sens de rotation du champ.
Accélération du rotor et glissement
L'ensemble des forces agissant sur les conducteurs produit un couple qui met rapidement le rotor en mouvement quand il est libre de tourner. À mesure que le rotor accélère, la vitesse relative du champ tournant par rapport au rotor diminue.
On note alors que la valeur et la fréquence de la tension induite dans les conducteurs du rotor diminuent, car la vitesse de coupure des lignes de flux décroît. Le courant, intense au début, tombe rapidement. La vitesse du rotor continue d'augmenter, mais elle n'atteint pas celle du champ tournant.
En effet, si le rotor tournait à la même vitesse que le champ (vitesse synchrone), le flux ne couperait plus les conducteurs ; la tension induite et les courants dans le rotor seraient donc nuls.
Dans ces conditions, les forces agissant sur les conducteurs deviendraient nulles et le frottement du rotor sur les paliers et sur l'air aurait tôt fait de freiner le moteur.
La vitesse du rotor doit donc être légèrement inférieure à la vitesse synchrone pour produire un courant et, par conséquent, un couple suffisant pour vaincre les frottements.
À vide, c'est-à-dire lorsque le moteur n'entraîne aucune charge mécanique, la différence entre la vitesse du champ tournant et celle du rotor est très faible : moins de 0,1 % de la vitesse synchrone. On dit alors que le glissement est de 0,1 %.
Moteur en charge
On a vu que le moteur tourne à une vitesse voisine de la vitesse synchrone lorsqu'il n'est pas chargé. Quand on le charge, il ralentit. Le champ tournant coupe alors les barres du rotor à une vitesse relative plus grande. Il en résulte que la tension induite et le courant dans le rotor augmentent de façon à développer un couple suffisant pour vaincre la charge mécanique à entraîner.
La vitesse se stabilise lorsque le couple développé par le moteur est exactement égal au couple imposé par la charge. Noter que la diminution de vitesse est très petite.
Même à pleine charge, le glissement du rotor ne dépasse guère 0,5 % de la vitesse synchrone pour les gros moteurs (1000 kW et plus) et 3 % pour les petits (10 kW et moins). C'est pourquoi l'on considère souvent les moteurs asynchrone comme des moteurs à vitesse constante.
On ne peut augmenter indéfiniment la charge mécanique appliquée à un moteur asynchrone; si la charge dépasse une certaine valeur, la vitesse tombe subitement et le moteur s'arrête.
Glissement et vitesse de glissement
La vitesse de glissement ng d'un moteur asynchrone est simplement la différence entre la vitesse synchrone et la vitesse du rotor:
ng = ns - n (33-2a)
Par ailleurs, le glissements d'un moteur asynchrone est la différence entre la vitesse synchrone et celle du rotor exprimée relativement à la vitesse synchrone.
On peut donc écrire:
S = (ns - n) / ns = ng / ns (33-2b)
où s = glissement [p.u.]
ns = vitesse synchrone [r/min]
n = vitesse du rotor [r/min]
ng = vitesse de glissement [r/min]
La valeur de n est positive lorsque le rotor tourne dans le même sens que le champ tournant.
Si on multiplie la valeur relative (p.u.) du glissement s par 100, on obtient le glissement en pour cent. Le glissement d'un moteur tournant à vide est presque nul alors qu'il est de 1 (ou 100 %) lorsque le rotor est à l'arrêt.
Exemple 33-2
Un moteur asynchrone à 6 pôles est alimenté par une source triphasée à 60 Hz. En charge, il tourne à une vitesse de 1140 r/min.
Calculer sa vitesse de
glissement et son glissement.
Solution
Vitesse synchrone du moteur:
ns = 120f / p = 120 x 60 / 6 = 1200 r/min
Vitesse de glissement:
ng = ns - n = 1200 - 1140 = 60 drain
En appliquant la formule (33-2b), on obtient le glissement:
S = (ns - n) / ns = 60 / 1200 = 0,05 ou 5 %
Tension et fréquence induites dans le rotor
La tension et la fréquence induites dans le rotor pendent du glissement.
Elles sont données par les équations suivantes :
f2 = sf (33-3)
et
E2 = sEco (33-4)
où
f2 = fréquence dans le rotor [Hz]
f = fréquence du réseau alimentant le stator [Hz]
s = glissement
E² = tension induite dans le rotor à circuit ouvert [V]
Eco = tension induite dans le rotor à circuit ouvert, le rotor étant immobile [V]
Dans un rotor à cage, la tension Eco à circuit ouvert est celle qu'on obtiendrait aux bornes des barres si elles étaient disconnectées des anneaux.
Dans le cas d'un moteur à bagues, elle est égale à 1/√3 de la tension mesurée aux bornes des bagues à circuit ouvert.
Exemple 33-3
Un moteur asynchrone possédant 6 pôles est alimenté par une source triphasée de 60 Hz.
Calculer la fréquence du courant dans le rotor dans les conditions suivantes :
a) rotor bloqué
b) rotor tournant à 500 r/min dans le même sens que le champ tournant
c) rotor tournant à 500 r/min dans le sens inverse du champ tournant
d) rotor tournant à 2000 r/min dans le même sens que le champ tournant
Solution
La vitesse synchrone du moteur, calculée dans l'exemple 33-2, est de 1200 r/min.
a) À l'arrêt, la vitesse du moteur est nulle; par conséquent, d'après l'équation 33-3, le glissement est :
s = (ns - n) / ns = (1200 - 0) / 1200 = 1
La fréquence de la tension et du courant induits dans le rotor est:
f2 = sf = 1 X 60 = 60Hz
b) Lorsque le moteur tourne dans le même sens que le champ, la vitesse n du moteur est considérée comme positive.
Le glissement est:
s = (ns - n) / ns = (1200 - 500) / 1200 = 0,583
La fréquence de la tension et du courant induits dans le rotor est:
f2 = sf = 0,583 x 60 = 35 Hz
c) Lorsque le rotor tourne dans le sens inverse du champ, la vitesse du moteur est négative.
Le glissement est:
s = (ns - n) / ns = (1200 - (-500)) / 1200 = 1,417
La fréquence de la tension et du courant induits dans le rotor est:
f2 = sf = 1,417 x 60 =85Hz
d) Lorsque le moteur tourne à 2000 r/min dans le même sens que le champ, la vitesse est toujours positive.
Le glissement est:
s = (ns - n) / ns = (1200 - 2000)) / 1200 = -0,667
Un glissement négatif indique que le moteur fonctionne comme génératrice.
La fréquence de la tension et du courant dans le rotor est:
f2 = s f = -0,667 x 60 = -40Hz
Une fréquence négative indique que la séquence des phases dans le rotor est inversée. Par exemple, si la séquence des tensions dans le rotor est A-B-C lorsque la fréquence est positive, la séquence sera A-C-B lorsque la fréquence devient négative.
Toutefois, un fréquencemètre donnera la même lecture, que la fréquence soit positive ou négative.
Caractéristiques des moteurs à cage d'écureuil
Le tableau 33-1 donne les caractéristiques électriques moyennes des moteurs asynchrones à cage d'écureuil dans la gamme des puissances comprises entre 1 kW et 20 MW.
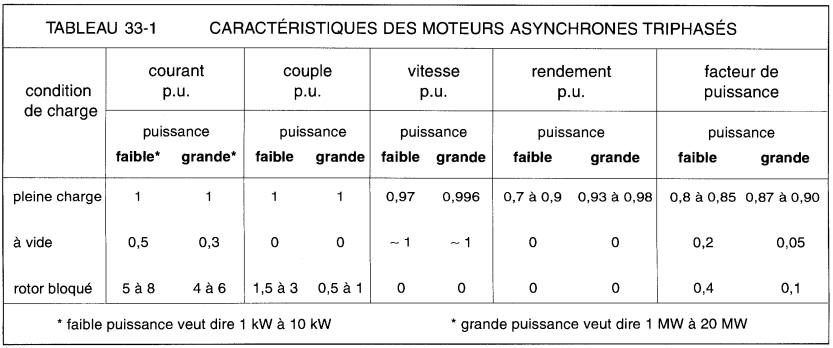
Les explications suivantes nous aideront à comprendre les valeurs relatives (p.u.) indiquées.
1. Moteur fonctionnant à vide.
Lorsque le moteur tourne à vide, le courant est compris entre 50 % et 30 % du courant de pleine charge. Ce courant est semblable au courant d'excitation d'un transformateur.
Ainsi, il est composé en majeure partie d'un courant magnétisant qui produit le flux tournant 0m et d'une faible composante active pour fournir les pertes par frottement et aération, plus les pertes dans le fer.
Le flux On, accroche le rotor et le stator: par conséquent, il est semblable à un flux mutuel (Fig. 33-14).
Figure 33-14 Lorsqu'un moteur asynchrone fonctionne à vide, le flux créé est essentiellement un flux mutuel Om. À cause de la présence de l'entrefer, une puissance réactive considérable est requise pour produire ce flux
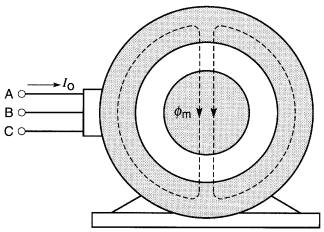
La puissance réactive requise pour créer le champ tournant est donc considérable et, afin de la réduire, on est amené à utiliser un entrefer aussi petit que possible, en tenant compte des tolérances mécaniques acceptables.
Le facteur de puissance à vide est compris entre 20 % pour les petits moteurs et 5 % pour les gros. Le rendement est nul, car la machine ne débite aucune puissance utile.
2. Moteur fonctionnant à pleine charge.
Lorsque le moteur est en charge, le courant circulant dans le rotor produit une FMM qui tend à changer le flux mutuel Φm. Ceci engendre un courant dans le stator dont la FMM tend à s'opposer à celle créée par le rotor.
Ces FMM sont très semblables à celles produites par le primaire et le secondaire d'un transformateur sous charge. Par conséquent, en plus du flux mutuel Φm des flux de fuite Φf1 et Φf2 sont créés, (Fig. 33-15).
Figure 33-15 À pleine charge, le flux mutuel Om diminue mais des flux de fuites sont créés par le rotor et le stator. Il s'ensuit que la puissance réactive est légèrement supérieure à celle obtenue dans la figure 33-14
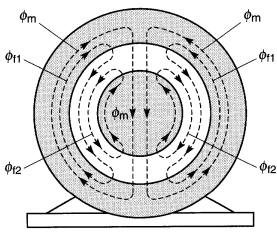
Lorsque le moteur fonctionne en charge, la puissance réactive (kvar) requise pour produire ces trois flux est légèrement supérieure à celle absorbée à vide.
Par contre, la puissance active (kW) absorbée par le moteur varie proportionnellement avec la charge mécanique.
Il s'ensuit que le facteur de puissance du moteur (kW/kVA) s'améliore à mesure que la charge croît: à pleine charge, il est compris entre 80 % pour les petits moteurs et 90 % pour les gros.
Le rendement à pleine charge est particulièrement élevé; il peut atteindre 98 % pour les grosses machines.
Enfin, le tableau indique que la vitesse à pleine charge est comprise entre 0,97 et 0,996 de la vitesse synchrone.
3. Moteur au démarrage.
Lorsque le rotor est bloqué, le courant est 5 à 8 fois plus grand que le courant de pleine charge.
Cela entraîne des pertes Joule de 25 à 64 fois plus grandes que les pertes normales. On doit donc éviter de bloquer le rotor, pour prévenir la surchauffe des enroulements.
Puisque le moteur ne tourne pas, la puissance mécanique est nulle, son rendement est donc nul. Cependant, il développe un couple considérable.
En ce qui concerne le facteur de puissance, il demeure bas, car une grande puissance réactive est requise pour entretenir les flux de fuite du rotor et du stator.
Ces flux sont beaucoup plus grands que dans un transformateur, car les enroulements du stator et du rotor ne sont pas couplés aussi étroitement (voir section 30.12).
Calcul approximatif des caractéristiques d'un moteur
Le tableau 33-1 nous permet de calculer l'ordre de grandeur des caractéristiques d'un moteur asynchrone quelconque.
L'exemple suivant présente la marche à suivre.
Exemple 33-4
Soit un moteur asynchrone triphasé de 500 hp, 2300 V, 890 r/min.
a) Exprimer la puissance du 1nolcur en kilowatts.
b) Calculer la valeur approximative du courant de pleine charge, du courant à vide et du courant de démarrage
c) Faire une estimation (le la puissance apparente tirée parle moteur nu nuement du démarrage, sous pleine tension.
d) Calculer la valeur approximative e du couple lorsque le rotor est bloqué.
Solution
a) La puissance d'un moteur est toujours celle que le moteur développe mécaniquement. La puissance de 500 hp correspond à 500 x 746 = 373 kW.
Le tableau donne les caractéristiques relatives pour les moteurs dont la puissance est comprise entre 1 kW et 10 kW, pour ensuite sauter de 1 MW à 20 MW.
Comme la puissance du moteur est plus proche de 1 MW que de 10 kW, nous tirons les valeurs suivantes du tableau :
rendement: 0,93
facteur de puissance: 0,87
courant à vide: 0,3 p.u.
couple à rotor bloqué: 0,5 à 1 p.u.
courant à rotor bloqué: 4 à 6 p.u.
b) Puissance active tirée de la ligne:
P = 373 kW/rendement = 373/0,93 = 401 kW
Puissance apparente tirée de la ligne :
S = 401 kW/FP= 401/0,87 = 461 kVA éq. 25-6
Puissance réactive tirée de la ligne :
Q = √(461² - 401²) = 227 kvar éq. 25-5
Courant de pleine charge:
I = S/(E√3) = 461000 / (2300√3) = 116A éq. 26-3
Courant à vide = 116 x 0,3 p.u. = 35 A
Courant à rotor bloqué = 116 x (4 à 6 p.u.) = 464 A à 696 A selon le design.
c) Puissance apparente lorsque le rotor est bloqué :
S = 2300√3 x (464 A à 696 A) = 1,8 à 2,8 MVA
d) Couple de pleine charge:
T = 9,55 P / n = 9,55 x 373 000 / 890 = 4 kN.m éq. 1-5
Couple à rotor bloqué:
T bloqué = 4 kNm x (0,5 à 1,0 p.u.) = 2 à 4 kNm, selon le design.
Il est parfois utile de faire une estimation rapide des courants et des puissances d'un moteur asynchrone triphasé.
On peut alors utiliser l'une des formules suivantes qui donnent la valeur approximative du courant à pleine charge:
I = 600 Php / E (33-5a)
I = 800 PkW / E (33-5b)
où
I = courant
approximatif à pleine charge [A]
Php = power [hp]
PkW = puissance nominale du moteur, en kilowatts [kW]
E = tension triphasée nominale du moteur [V]
600, 800 = constantes empiriques
Par exemple, un moteur triphasé de 30 hp, 600 V, tire un courant d'environ 30 A à pleine charge.
On se souviendra également que la valeur du courant de démarrage (rotor bloqué) vaut environ 6 fois celle du courant de pleine charge et que le courant à vide est compris entre 30 % et 50 % du courant de pleine charge.
Ces règles de base permettent de calculer les valeurs approximatives du courant de n'importe quel moteur triphasé alimenté à une tension quelconque.
Cheminement de la puissance active
Les tensions et les courants d'un moteur asynchrone permettent de comprendre son fonctionnement détaillé.
Cependant, on comprend mieux la transformation de l'énergie électrique en énergie mécanique en suivant le cheminement de la puissance active qu'il absorbe (voir Fig. 33-16).
Figure 33-16 Cheminement de la puissance active dans un moteur asynchrone triphasé. Dans plusieurs calculs pratiques, les pertes P, sont assimilées aux pertes Pf dans le fer.
Dans ce cas Pmc = Pm.
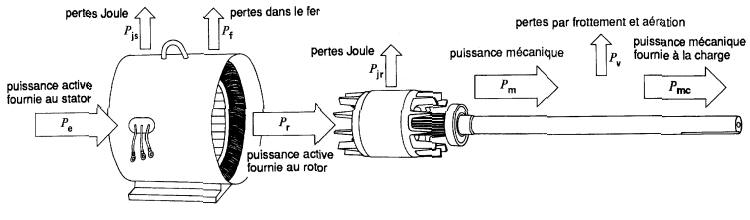
Ainsi, lorsqu'on alimente un moteur asynchrone, une partie Pjs, de la puissance active Pe qu'il reçoit est dissipée par effet Joule dans les enroulements du stator, et une autre partie Pf est perdue dans le fer.
Le reste de la puissance, Pr, est transporté au rotor, par induction, à travers l'entrefer.
Une troisième tranche Pjr se dissipe par effet Joule dans les enroulements du rotor, et le reste Pm est enfin disponible sous forme de puissance mécanique.
Si l'on en soustrait les pertes par ventilation et friction Pv on obtient la puissance mécanique Pmc fournie à la charge.
Afin d'exploiter ce diagramme de répartition des puissances actives pour les calculs, on donne ci-après trois relations importantes associées à ces diverses puissances.
1. Rendement.
Le rendement du moteur est, par définition, le rapport entre le puissance mécanique Pmc fournie à la charge et la puissance électrique Pe fournie au moteur soit:
rendement (η) = Pmc / Pc (33-6)
2. Pertes Joule dans le rotor.
On peut démontrer (texte encadré) que la relation entre les pertes Joule Pjr dans le rotor et la puissance Pr qu'il reçoit est donnée par la formule:
Pjr = sPr (33-7)
où
Pjr = pertes Joule dans le rotor [W]
s = glissement
Pr = puissance transmise au rotor [W]
3. Puissance mécanique
La puissance mécanique Pm, développée par le moteur est égale à la puissance transmise au rotor moins les pertes Joule dans celui-ci.
Ainsi,
Pm = Pr - Pjr = Pr - sP1
d'où
Pm = Pr (1 - s) (33-8)
En raison des pertes Pv par frottement et aération, la puissance mécanique Pmc disponible pour entraîner la charge est légèrement inférieure à Pm.
Dans la plupart des calculs pratiques, on incorpore les pertes Pv avec les pertes dans le fer Pf.
Dans ces circonstances, la puissance Pmc se confond avec la puissance Pm.
4. Couple du moteur.
Le couple développé par le moteur est donné par l'expression :
T = 9.55Pm / n éq. 1-5
Démonstration de la relation Pjr = sPr
puissance mécanique =
puissance électromagnétique transmise au rotor - pertes électriques dans le rotor
Pm = Pr - Pjr (i)
D'après l'équation 1-5 du côté du rotor :
Pm = vitesse du rotor x couple mécanique / 9,55
donc Pm = nTm / 9,55 (ii)
D'après l'équation 1-5 du côté du stator :
Pr = vitesse du flux x couple électromagnétique / 9,55
donc Pr= nsTmag / 9,55 (iii)
mais d'après la loi de l'action et de la réaction de Newton, le couple mécanique Tm est nécessairement égal au couple électromagnétique mag Tmag :
soit Tm= Tmag (iv)
aussi s = (ns - n) / ns éq. 33-21
en substituant (ii), (iii) et (iv) dans (i) on trouve
Pjr = sPr
Si on substitue dans cette équation les expressions du glissement et de la puissance mécanique, on obtient:
T = 9,55Pr (1 - s) / ns (1 - s) = 9,55 Pr / ns
donc
T = 9,55 Pr / ns (33-9)
où
T = couple, en
newton-mètres [N•m]
Pr = puissance transmise au rotor, en watts [W]
ns = vitesse synchrone, en tours par minute [r/min]
9,55 = facteur tenant compte des unités [valeur exacte 30/π]
Les équations 33-6 à 33-9 sont valables pour toutes les vitesses, positives et négatives, y compris la vitesse nulle au moment du démarrage.
L'équation 33-7 nous indique que les pertes Joule dans le rotor croissent lorsque le glissement augmente.
Ainsi, un rotor tournant à la moitié de la vitesse synchrone (s = 0,5) dissipe sous forme de chaleur 50 % de la puissance qu'il reçoit.
Au moment du démarrage (s = 1), toute la puissance est dissipée en chaleur dans le rotor.
L'équation (33-9) nous révèle que le couple est d'autant plus grand que la puissance Pr fournie au rotor est plus élevée.
Donc, pour obtenir un fort couple de démarrage, il faut fournir une grande puissance active au rotor.
Toutefois, comme celle-ci est alors entièrement dissipée en chaleur, la température du rotor monte très rapidement.
Exemple 33-5
Un moteur asynchrone triphasé ayant une puissance nominale de 100 hp (-= 75 kW) est alimenté par une lime à 600 V (Fie. 33-17a)
Figure 33-17a Voir exemple 33-5
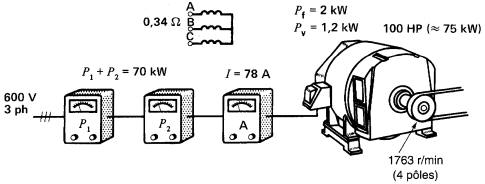
Deux wattmètres placés dans les fils (le ligne indiquent une puissance totale de 70 kW et un ampèremètre indique un courant de ligne de 73 A.
Des mesures précises indiquent une vitesse de rotation de 1763 r/min.
De plus, on fournil 1
information suivante :
e) le couple développé par le moteur
a) la
puissance Pr fournie au rotor
b) les pertes Joule dans le rotor
c) la puissance mécanique fournie à la charge, en hp
d) le rendement du moteur
e) le couple développé par le moteur
Solution
1. Puissance fournie au stator:
Pe =70kW
2. Résistance du stator par phase (on suppose une connexion en étoile):
R= 0,34 / 2 = 0,17Ω
3. Pertes Joule dans le stator:
pjs =3RI² = 3 x0,17 x (78)² = 3,1kW
4. Pertes dans le fer :
Pf = 2kW
5. Puissance fournie au rotor :
Pr = Pe - Pjs - Pf = (70-3,1-2) = 64,9 kW
6. Glissement:
S = (ns
- n) /
ns = (1800 - 1763) / 1800 = 0,0206
7. Pertes Joule dans le rotor:
Pjr = sPr = 0,0206 X 64,9 = 1,3 kW
8. Puissance mécanique interne Pm :
Pm = Pr - Pjr = 64,9 - 1,3 = 63,6 kW
9. Puissance mécanique Pmc fournie à la charge :
Pmc = Pm - Pv = 63,6 - 1,2 = 62,4 kW
10. Puissance mécanique exprimée en horsepower :
Pmc = 62 400 / 746 = 83,6 hp
11. Rendement du moteur:
η = Pmc / Pe = 62,4 / 70 = 0,89 ou 89 %
12. Couple interne développé par le moteur :
T = 9,55Pr / ns = 9,55 x 64 900 / 1800 = 344 N•m
13. Couple qui entraîne la charge :
Tmc = 9,55 Pmc / n = 9,55 x 62 400 / 1763 = 338 N•m
Ce couple est légèrement inférieur au couple interne à cause du couple requis pour vaincre les pertes par ventilation et friction.
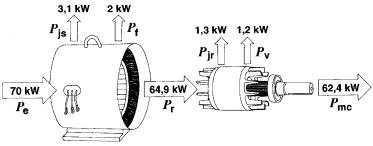
La Fig. 33-17b montre le cheminement des puissances.
Figure 33-17b Cheminement des puissances pour l'exemple 33-5
Courbes du couple en fonction de la vitesse
Considérons un moteur à cage, alimenté par une source triphasée dont la tension et la fréquence sont fixes.
À mesure qu'on augmente la charge mécanique, la vitesse baisse progressivement. Cependant, lorsque le couple atteint la valeur critique appelé point de décrochage, la vitesse chute subitement et le moteur s'arrête. Il existe donc une relation entre le couple développé par le moteur et sa vitesse.
Cette relation n'est pas simple; c'est pourquoi on préfère la présenter sous forme de courbe plutôt que par une équation.
On montre à la Fig. 33-18 une courbe du couple en fonction de la vitesse pour un moteur de 1 kW, de construction conventionnelle.
Figure 33-18 Courbe typique du couple en fonction de la vitesse d'un moteur asynchrone triphasé de 1 kW.
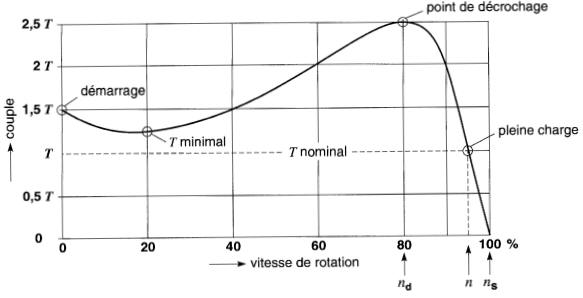
Si T désigne la valeur du couple de pleine charge, on voit que le couple de démarrage vaut 1,5 T.
À mesure que la vitesse croît, le couple diminue, et passe par un minimum avant d'augmenter de nouveau.
Il atteint une valeur maximale de 2,5 T à 80 % de la vitesse synchrone. Passé ce point, le couple diminue, tandis que la vitesse continue à augmenter.
On passe alors par le point d'opération normal (T, n) de pleine charge, avant d'atteindre la vitesse synchrone ns, où le couple est nul.
Les moteurs de petite puissance (10 kW et moins) atteignent leur couple de décrochage à une vitesse nd qui est d'environ 80 % de la vitesse synchrone; les machines de grosse puissance (1000 kW et plus) décrochent à une vitesse de l'ordre de 0,98 ns.
La forme de la courbe couple/vitesse dépend donc de la grosseur du moteur et de ses caractéristiques particulières.
Effet de la résistance du rotor
Si l'on augmente la résistance du rotor sans effectuer aucun autre changement, on constate que la courbe du couple en fonction de la vitesse change.
Le couple de décrochage demeure le même, mais il est développé à une vitesse plus basse.
Le couple de démarrage, la vitesse de régime permanent et les autres propriétés du moteur sont également affectés comme le démontre l'exemple suivant.
La Fig. 33-19a illustre les caractéristiques du couple en fonction de la vitesse (T vs n) et du courant en fonction de la vitesse (I vs n) d'un moteur à cage de 10 kW, 50 Hz, 380 V ayant une vitesse synchrone de 1000 r/min.
Figure 33-19 Courbes montrant le changement progressif des propriétés d'un moteur asynchrone de 10 kW, 50 Hz, 380 V à mesure que la résistance du rotor augmente.
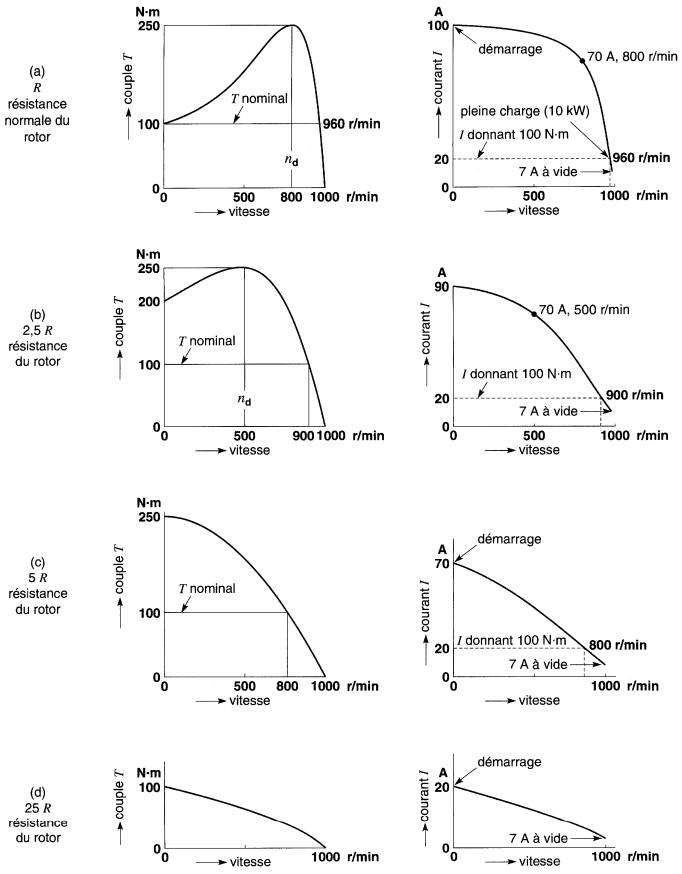
Le couple nominal est de 100 N.m. Le courant nominal est de 20 A, le courant à vide est de 7 A, et le courant de démarrage est de 100 A.
La résistance du rotor a une valeur normale R. À pleine charge, le couple est de 100 N•m à une vitesse de 960 r/min. Le couple de décrochage de 250 N•m se produit à une vitesse de 800 r/min.
La Fig. 33-19b montre les nouvelles courbes T vs n et I vs n lorsque la résistance du rotor est augmentée à 2,5 R. Cette augmentation pourrait se faire en remplaçant le rotor par un autre dont la section des barres et des anneaux est réduite par un facteur 2,5.
On constate que le couple de démarrage augmente de 100 à 200 N•m, alors que le courant correspondant diminue de 100 A à 90 A.
Le couple de décrochage nd est atteint lorsque la vitesse est de 500 r/min, comparativement à sa valeur originale de 800 r/min.
Notons aussi que la vitesse au couple nominal (100 N •m) est maintenant 900 r/min au lieu de 960 r/min.
En doublant à nouveau la résistance de telle sorte qu'elle devienne 5 R, on atteint un couple de démarrage de 250 N•m pour un courant correspondant de 70 A (Fig. 33-19 c).
Cela procure une réduction intéressante du courant de démarrage. Cependant, la vitesse au couple nominal est maintenant de 800 r/min seulement.
Si l'on augmente la résistance au-delà de 5 R, le couple de démarrage commence à décroître.
Par exemple, si la résistance est 25 R, le courant de démarrage est de 20 A seulement, mais le moteur développe le même couple que lorsque le courant était de 100 A (Fig. 33-19d).
Le tableau 33-2 montre les caractéristiques principales du moteur en fonction de la résistance du rotor.
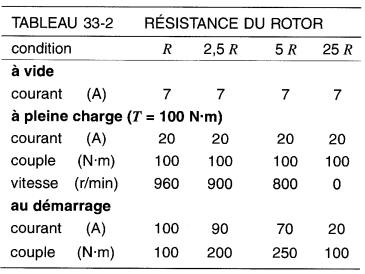
En résumé, une résistance du rotor relativement élevée donne un bon couple de démarrage tout en réduisant le courant correspondant.
Par contre, en régime normal, on désire une résistance basse, car la vitesse demeure plus stable lorsque la charge varie, les pertes Joule au rotor sont moins élevées et le rendement du moteur est meilleur.
On peut atteindre ces deux objectifs opposés en utilisant une construction spéciale pour la cage d'écureuil (voir Applications des machines asynchrones triphasées). Une autre solution est d'employer un moteur à rotor bobiné.
Le rotor bobiné permet de faire varier la résistance du rotor au moyen d'un rhéostat extérieur, selon les exigences.
Moteur à rotor bobiné
Nous avons vu à la section 33.1 les différences de construction entre le moteur à cage d'écureuil et le moteur à rotor bobiné.
Ce dernier est aussi appelé moteur à bagues. Bien que le moteur à bagues soit plus coûteux que le moteur à cage, il offre, cependant, les avantages suivants :
1. son courant de démarrage est moins élevé que celui d'un moteur à cage lorsqu'on intercale trois résistances extérieures dans l'enroulement triphasé du rotor
2. son couple de démarrage est alors supérieur à celui du moteur à cage ordinaire
3. sa vitesse peut être réglée au moyen de résistances extérieures
En plus de convenir aux charges qui demandent une vitesse variable, ce moteur s'adapte parfaitement aux charges qui exigent une période de démarrage prolongée, accompagnée d'un couple de démarrage élevé.
La Fig. 33-20 représente schématiquement le montage employé pour le démarrage d'un moteur à rotor bobiné.
Figure 33-20 Montage d'un moteur à rotor bobiné
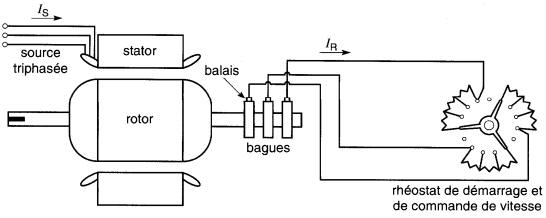
Par l'intermédiaire des bagues, on relie les enroulements du rotor à trois résistances extérieures variables, raccordées en étoile.
Au démarrage, les résistances variables ont leur valeur maximale.
Au fur et à mesure que la vitesse du moteur augmente, on réduit la valeur des résistances.
Quand la vitesse de régime permanent est atteinte, on court-circuite les trois enroulements. Un choix approprié de la valeur des résistances (Fig. 33-19) permet d'obtenir à la fois une grande diminution du courant de démarrage et une forte augmentation du couple moteur.
Dans le cas des moteurs de grande capacité, on utilise souvent un rhéostat liquide pour assurer le démarrage. Ce rhéostat est constitué de trois électrodes baignant dans un électrolyte dont le principal composant est de l'eau.
Pour faire varier la résistance, on change tout simplement le niveau de l'électrolyte qui entoure les électrodes. La grande capacité thermique de l'eau évite une augmentation excessive de température lors du démarrage.
Par exemple, dans un poste de transformation à Winnipeg, Manitoba, on utilise un moteur à rotor bobiné de 1260 kW avec rhéostat liquide pour démarrer et porter à la vitesse synchrone un gros compensateur synchrone de 160 MVA.
On peut régler la vitesse du moteur à rotor bobiné en faisant varier la résistance du rhéostat.
La vitesse est d'autant plus basse que la résistance est plus grande. Cette méthode présente l'inconvénient qu'une partie importante de la puissance fournie au moteur est dissipée en chaleur dans les résistances ; le rendement est donc mauvais.
De plus, la vitesse varie sensiblement avec les fluctuations de la charge mécanique.
La puissance motrice qu'on peut tirer d'un moteur à rotor bobiné dépend de sa vitesse.
Ainsi, pour le même échauffement, un moteur qui peut produire 100 kW à 3600 r/min ne fournira que 40 kW environ à 1800 r/min.
Lorsqu'on désire faire varier la vitesse d'un gros moteur, la perte de puissance continuelle dans un rhéostat extérieur devient inacceptable. Dans ces circonstances, on utilise des onduleurs électroniques dans le circuit du rotor.
Au lieu de gaspiller cette énergie, les onduleurs la renvoient dans le réseau triphasé qui alimente le moteur. Le principe de fonctionnement de ces onduleurs est expliqué à la section Applications des machines asynchrones triphasées
Bobinages triphasés
En 1883, à l'âge de 27 ans, le Yougoslave Nikola Tesla inventait le moteur asynchrone triphasé. Son premier modèle ressemblait beaucoup au stator de la Fig. 33-9.
Depuis, la construction des machines et, en particulier, des bobinages a beaucoup évolué; les moteurs asynchrones modernes sont tous construits avec des enroulements distribués dans plusieurs encoches.
Presque tous les moteurs triphasés utilisent les enroulements imbriqués. Un enroulement imbriqué est composé de groupes de bobines distribués uniformément à la périphérie du stator (voir, par exemple, les Fig. 33-1, 33-12 et 33-13).
Le nombre de groupes est donné par l'expression:
nombre de groupes = nombre de x nombre de pôles phases
Par exemple, un moteur triphasé à 4 pôles aura 4 x 3 = 12 groupes.
Étant donné qu'un groupe doit comprendre au moins une bobine, il s'ensuit que le nombre de bobines ne peut pas être inférieur au nombre de groupes.
Ainsi, un moteur triphasé à 4 pôles doit posséder au moins 12 bobines.
Dans un enroulement imbriqué le nombre de bobines est égal au nombre d'encoches. Par conséquent, un moteur triphasé à 4 pôles doit avoir au moins 12 encoches.
Cependant, les concepteurs de machines ont découvert qu'il est préférable d'employer 2, 3 bobines ou plus par groupe plutôt que seulement une. Cela augmente proportionnellement le nombre de bobines et d'encoches.
Par exemple, un moteur triphasé à 4 pôles avant 5 bobines par groupe aura un total de 4 pôles x 3 phases x 5 bobines/groupe = 60 bobines logées dans 60encoches.
Les bobines d'un même groupe sont raccordées en série et elles sont réparties dans 5 encoches successives (Fig. 33-21).
Figure 33-21 Les cinq bobines raccordées en série forment un groupe. Un groupe correspond à un pôle d'une phase.
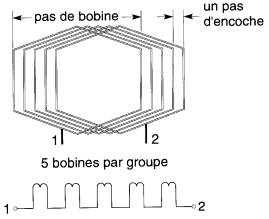
Les bobines sont identiques et peuvent contenir plusieurs spires. La largeur d'une bobine s'appelle pas de la bobine.
Il est évident qu'un enroulement distribué de cette panière dans plusieurs encoches coûte plus cher que si l'on utilisait une seule bobine par groupe.
Cependant, un enroulement distribué améliore le couple lors du démarrage, tout en réduisant le bruit lorsque le moteur atteint sa vitesse de régime permanent.
Lorsque le stator est excité par une source triphasée, un champ tournant multipolaire est créé.
La distance entre deux pôles adjacents s'appelle pas polaire. Un pas polaire est égal à la circonférence intérieur du stator divisée par le nombre de pôles.
Par exemple, un stator à 12 pôles, 72 encoches ayant un diamètre intérieur de 200 mm aura un pas polaire de:
pas polaire = πd / pôles = π x 200 / 12= 52,3 mm
En pratique, le pas polaire est exprimé par le nombre d'encoches divisé par le nombre de pôles.
Ainsi, dans l'exemple que nous venons de donner, le pas polaire serait:
pas polaire = nombre d'encoches / nombre de pôles = 72 / 12 = 6 encoches
Il s'ensuit qu'un pas polaire s'étend de l'encoche 1 à l'encoche 7. Le pas de bobine est habituellement compris entre 80 % et 100 % du pas polaire.
L'utilisation d'un pas raccourci (inférieur à 100 %) permet d'améliorer la distribution du flux tournant, et de diminuer la quantité de cuivre requise.
Dans le cas d'une machine à 2 pôles, le pas raccourci facilite de beaucoup le bobinage du moteur.
Afin d'expliquer la façon dont l'enroulement imbriqué est installé dans les encoches, considérons un stator possédant 24 encoches, et imaginons qu'on le déroule de sorte que la circonférence devienne rectiligne (Fig. 33-22a).
Figure 33-22a Les 24 bobines sont tenues debout dans les 24 encoches. La largeur P est le pas de bobine
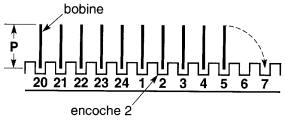
Les 24 bobines sont tenues debout dans chacune des 24 encoches.
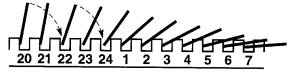
Si l'on rabat les enroulements de sorte que les autres côtés des bobines tombent aussi dans les encoches, on obtient l'apparence classique d'un enroulement triphasé imbriqué (Fig. 33-22b).
Figure 33-22b Les bobines sont rabattues, créant ainsi l'apparance typique d'un enroulement imbriqué.
Il reste à connecter les bobines ensemble afin d'obtenir le nombre de pôles requis et à sortir les trois fils d'alimentation à l'extérieur de la machine.
L'exemple illustratif qui suit fera comprendre les différentes connexions et la façon de disposer les bobines.
Exemple illustratif 33-6
On veut bobiner un moteur triphasé à 4 pôles, utilisant un stator à 24 encoches. Le bobinage sera donc composé de 24 bobines.
Les 24 bobines étant placées debout, chacune dans une encoche, nous déterminerons d'abord l'emplacement des groupes, puis nous ferons les connexions requises pour la phase A.
La même méthode est utilisée pour les phases B et C.
On fait alors le raisonnement suivant:
a) Le champ tournant possède 4 pôles; le moteur a donc 4 pôles par phase, soit un total de 12 groupes pour les 3 phases. Chaque rectangle de la Fig. 33-23a représente un groupe avec ses deux fils d'entrée et de sortie.
Figure 33-23a L'enroulement est composé de 12 groupes de 2 bobines par groupe

Comme le stator comporte 24 bobines, chaque groupe sera composé de 24/12 = 2 bobines consécutives.
Le schéma indique 12 groupes, donc 12 «pôles», mais le stator créera un champ tournant à 4 pôles lorsque les 3 phases seront alimentées.
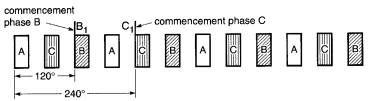
b) Les 4 groupes d'une phase doivent être répartis de façon uniforme autour du stator. On doit donc répartir la phase A selon la distribution de la Fig. 33-23b.
Figure 33-23b Les 4 groupes de la phase A sont disposés symétriquement autour du stator
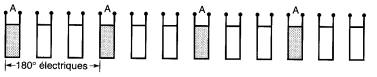
Remarquons qu'en ce qui concerne les tensions induites, la séparation mécanique entre deux groupes consécutifs d'une phase donnée correspond toujours à un déphasage électrique de 180°.
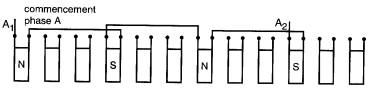
c) Les pôles successifs d'une phase doivent être de polarités contraires. On raccorde donc les 4 groupes de la phase A en série de façon à obtenir successivement des pôles N S N S (Fig. 33-23c).
Figure 33-23c Les groupes de la phase A sont raccordés en série afin de créer des pôles N,S successifs
En pratique, on fait les connexions après que les bobines aient été rabattues dans les encoches. Les groupes d'une même phase peuvent être raccordés en série. en parallèle ou en série-parallèle, pour autant que les polarités N, S soient respectées.
d) La répartition des groupes des phases B et C est identique à celle de la phase A. Cependant, on doit décaler leurs pôles N et S respectivement de 120° et de 240° électriques par rapport à ceux de la phase A (Fig. 33-23d).
Figure 33-23d Le début B1 de la phase B est décalé de 120° électriques par rapport au début A1 de la phase A. Le début C1 de la phase C est décalé de 120° électriques par rapport au début B 1 de la phase B. Cette répartition permet de désigner correctement tous les pôles des phases B et C autour du stator.
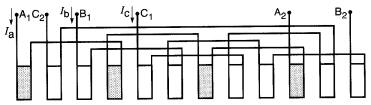
e) Les groupes des phases B et C sont raccordés en série de la même façon que pour la phase A (Fig. 33-24e).
Figure 33-23e Après le raccordement des groupes, il reste 6 fils de sortie, soit 2 fils par phase
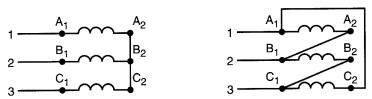
On obtient donc six bornes A1,A2 ; B1,B2; C1,C2 que l'on peut relier de façon à réaliser une connexion en étoile ou en triangle. Les 3 fils de sortie résultant de cette connexion sont amenés à l'extérieur de la machine aux bornes 1, 2, 3 (Fig. 33-23f).
Figure 33-23f On raccorde les trois phases en étoile ou en triangle pour obtenir les trois fils de sortie 1, 2 et 3 de la machine.
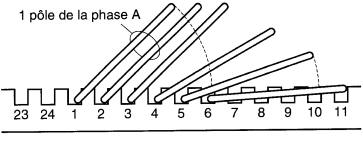
f) En rabattant les bobines, on obtient l'enroulement triphasé imbriqué. Comme le pas polaire s'étend sur 24/4 = 6 encoches, le pas P des bobines peut être raccourci à 5 encoches. Dans ce cas, la première bobine de la phase A sera donc logée dans la première et la sixième encoche (Fig. 33-24).
Figure 33-24 Le pas polaire va de l'encoche 1 à l'encoche 7 ; le pas des bobines s'étend de l'encoche 1 à l'encoche 6.
La Fig. 33-25 montre le stator et une des bobines d'un moteur asynchrone triphasé de 450 kW (600 hp).
Figure 33-25a Stator d'un moteur asynchrone de 450 kW, 1180 r/min, 575 V, 3 phases, 60 Hz. L'enroulement imbriqué est formé de 108 bobines préfabriquées dont le pas va de l'encoche 1 à l'encoche 15. On place un côté de la bobine dans le fond d'une encoche puis l'autre côté est placé dans le haut. Diamètre du rotor: 500 mm; longueur axiale: 460 mm (gracieuseté de Services Électromécaniques Roberge).
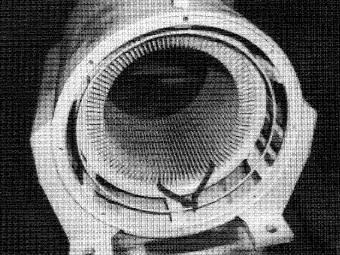
Figure 33-25b Photo montrant les dimensions et la forme des bobines (gracieuseté de Services Électromécaniques Roberge).
La Fig. 33-26 montre quelques étapes du bobinage d'un moteur de 37,5 kW (50 hp).
Figure 33-26 Bobinage du stator d'un moteur asynchrone triphasé de 37,5 kW, 1765 r/min, 575 V. Ce stator contient 48 encoches qui logent autant de bobines.
a) Bobine formée de 10 spires de 4 fils #17 isolés avec un vernis polyimide et prête à placer dans deux encoches.
b) On place un côté de la bobine dans l'encoche 1 (disons) et l'autre côté dans l'encoche 12. Le pas de la bobine s'étend donc de 1 à 12.
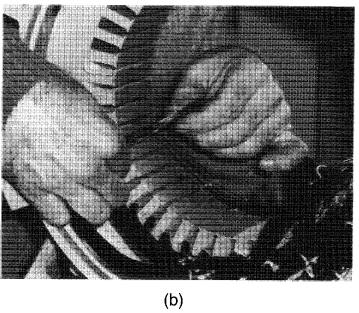
c) Chaque côté de bobine remplit la moitié d'une encoche et on le recouvre d'un papier isolant afin qu'il ne vienne pas en contact avec la deuxième bobine qui sera posée par-dessus. La photo montre, à partir du haut, trois encoches vides non isolées et 4 encoches vides isolées avec papier spécial. Les 10 autres encoches contiennent un côté d'une bobine.
d) Une feuille de toile vernie, découpée en forme de triangle, sert à augmenter l'isolation entre deux phases adjacentes.
Principe du moteur linéaire Soit un moteur triphasé à 8 pôles, 440 V, 60 Hz ayant une vitesse synchrone de 900 r/min.
Coupons le stator en deux et enlevons la moitié de l'enroulement. Il ne reste donc que 4 pôles par phase. Raccordons les trois phases en étoile, sans modifier les autres connexions entre les bobines.
Enfin, montons le rotor au dessus de ce stator sectoriel, en laissant un petit entrefer (Fig. 33-27).
Figure 33-27 Moteur asynchrone sectoriel
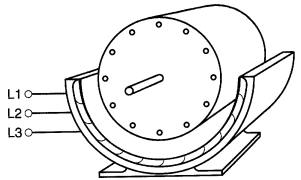
Si l'on raccorde les bornes du stator à une source triphasée de 60 Hz, le rotor tournera de nouveau à une vitesse proche de 900 r/min.
Afin d'éviter la saturation, la tension appliquée doit être réduite à environ la moitié de la tension nominale originale, soit environ 220 V.
Dans ces circonstances, ce moteur «sectoriel» peut développer environ 30 % de sa puissance originale. Le moteur sectoriel produit un champ «tournant» dont la vitesse de rotation est toujours 900 r/min.
Cependant, au lieu d'exécuter un tour complet, le champ se déplace continuellement d'un bout du stator sectoriel à l'autre.
Moteur d'induction linéaire
Il est clair qu'on pourrait aplatir le stator sectoriel sans affecter la forme ou la vitesse du champ magnétique.
Un stator plat produit un champ magnétique qui se déplace en ligne droite, à une vitesse constante.
En utilisant le même raisonnement que dans la section Champ tournant, on peut prouver que le flux se déplace à une vitesse linéaire donnée par la formule:
vs = 2wf (33-10)
ou
vs =
vitesse synchrone linéaire du champ [m/s]
w = longueur d'un pas polaire [m]
f = fréquence du réseau [Hz]
Notons que la vitesse ne dépend pas du nombre de pôles mais seulement du pas polaire.
Par conséquent, pour un pas polaire donné, un stator bipolaire ou un stator, disons, à 6 pôles produisent des flux de même vitesse.
Si une cage d'écureuil plate est placée à proximité du stator plat, le champ magnétique l'entraînera avec une force considérable. C'est le principe du moteur linéaire.
En pratique, une simple plaque de cuivre ou d'aluminium peut constituer le «rotor» (Fig. 33-28).
Figure 33-28 Composants d'un moteur linéaire triphasé
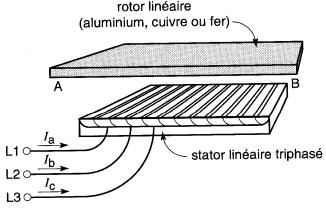
Afin d'augmenter la force de traction et pour réduire la réluctance du chemin magnétique, on peut monter deux stators face à face de chaque côté de la plaque.
Pour inverser la direction de la force, il suffit d'intervertir deux des fils alimentant le stator.
Dans plusieurs applications, il arrive que le rotor soit fixe alors que le stator se déplace.
Par exemple, dans les moteurs linéaires utilisés pour la propulsion de certains trains, le rotor est composé d'une plaque épaisse en aluminium, fixée au sol sur toute la longueur du parcours.
Le stator linéaire est fixé en dessous de la carrosserie de façon à enjamber la plaque. La vitesse est commandée en faisant varier la fréquence de la source qui alimente le stator (Fig. 33-29a et 33-29b).
Figure 33-29a Ce train électrique de 17 tonnes est propulsé par un moteur d'induction linéaire. Le moteur comprend un «rotor» stationnaire constitué par le rail vertical en aluminium situé au centre de la voie et un «stator» mobile fixé en dessous du train. Selon les données, le stator de 3 tonnes est alimenté par un onduleur dont la fréquence varie de 0 à 115 Hz. Ce moteur linéaire absorbe une puissance de 4,7 MVA et développe une force de traction maximale de 35 kN. La vitesse maximale du véhicule est de 200 km/h
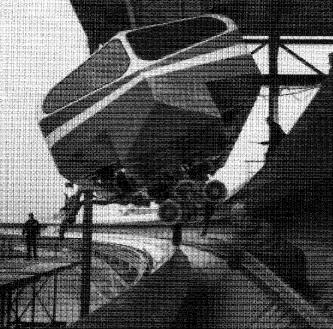
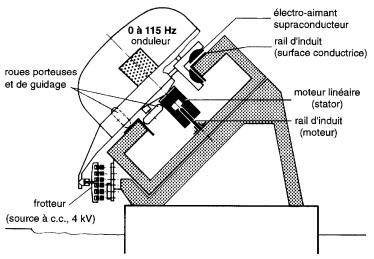
Figure 33-29b La vue en coupe du véhicule et de la voie montre l'agencement des parties principales. La sustentation électromagnétique est obtenue grâce à un électro-aimant supraconducteur ayant une longueur de 1300 mm, une largeur de 600 mm et une hauteur de 400 mm pesant 500kg. Les bobines de l'aimant, maintenues à une température de 4 kelvins par la circulation forcée d'hélium liquide, fonctionnent à une densité de courant de 80 A/mm2 et développent une densité de flux d'environ 3 T. La force de répulsion verticale peut atteindre une valeur maximale de 60 kN et la hauteur de sustentation varie entre 100 mm et 300 mm selon le courant d'alimentation
Exemple 33-7
Le stator d'un moteur linéaire est alimenté par une source électrique de 75 Hz. Le pas polaire a une longueur de 300 mm.
Calculer la vitesse du champ magnétique.
Solution La vitesse du champ est:
Vs =2wf = 2 x 0,3 x 75 = 45 m/s ou 162 km/h
Déplacement d'un champ magnétique linéaire
On pourrait penser que lorsque le flux atteint une extrémité du stator linéaire, il se produit un délai avant qu'il puisse reprendre sa course à l'autre extrémité.
Tel n'est pas le cas.
Le moteur triphasé produit une onde magnétique qui se déplace continuellement et uniformément d'une extrémité à l'autre du stator.
La Fig. 33-30 montre comment l'onde se déplace de gauche à droite dans un moteur linéaire bipolaire.
Figure 33-30 Forme linéaire du champ magnétique créé par un stator linéaire durant un cycle. Les instants successifs sont séparés d'un intervalle de 1/6 de cycle, soit de 2,78 ms sur un réseau à 60 Hz.
Le flux disparaît brusquement aux deux extrémités A et B du stator.
Cependant, aussitôt qu'un pôle N (ou un pôle S) «disparaît» à droite, il se renouvelle à gauche.
Propriétés du moteur linéaire
Les propriétés du moteur d'induction linéaire sont comparables à celles du moteur asynchrone conventionnel.
Par conséquent, les expressions pour le glissement, la force de traction, la puissance, etc., sont similaires.
1. Le glissement.
Le glissement d'un moteur linéaire est donné par:
s = vs - v / vs (33-11)
où
s = glissement
vs = vitesse synchrone linéaire du champ [m/s]
v = vitesse linéaire du rotor [m/s]
2. La puissance active.
La puissance active traverse un moteur linéaire de la même façon que dans un moteur rotatif (voir Fig. 33-16).
Par conséquent, les formules 33-6, 33-7 et 33-8 s'appliquent aux deux types de machines.
(i) le rendement est:
η = Pmc / Pc éq. 33-6
(ii) les pertes Joule dans le rotor sont:
pjr = sPr éq.33-7
(iii) la puissance mécanique est:
Pm = (1 - s)Pr éq. 33-8
3. La force.
La force de traction développée par un moteur linéaire est donnée par:
F = Pr / vs (33-12)
où
F = force de traction, en newtons [N]
Pr = puissance fournie au rotor [W]
vs = vitesse synchrone linéaire [m/s]
Exemple 33-8
Un pont roulant utilisé dans une usine est propulsé par deux moteurs linéaire montés sur la charpente du pont. Les rotors sont composés de deux poutres en acier formant le chemin de roulement.
Chaque moteur possède 4 pèles dont le pas et de 8 cm. Lors d'un essai sur un des moteurs, on a recueilli les résultats su sauts :
fréquence appliquée au stator : 15 Hz
puissance active absorbée par le stator: 5 kW
pertes dans le fer et le cuivre du stator : 1 kW
vitesse du pont roulant: 1,8 m/s
Calculer:
a) la vitesse synchrone et le glissement
b) la puissance fournie au rotor
c) les pertes Joule dans le rotor
d) la force de propulsion et la puissance mécanique du moteur
Solution
a) Vitesse synchrone linéaire :
vs =2wf = 2x 0,08 x 15 = 2,4 m/s = 8,6 km/h
glissement:
s = vs - v / vs = 2,4 - 1,8 / 2,4 = 0,25
b) Puissance fournie au rotor:
Pr = Pe - Pjs - Pf = 5 kW- 1 kW = 4 kW
c) Pertes Joule dans le rotor :
Pjr = sPr = 0,25 X 4 kW = 1 kW
d) Force de propulsion :
F = Pr / vs = 4000 / 2,4 = 1667 N = 1,67 kN (= 375 lbf)
Puissance mécanique développée
:
Pm = Pr - Pjr = 4 kW - 1 kW = 3 kW
Sustentation magnétique
Nous avons expliqué à la section Principe de fonctionnement du moteur asynchrone, comment un aimant permanent se déplaçant au-dessus d'une échelle conductrice tend à entraîner celle-ci dans le sens du déplacement de l'aimant.
Nous allons montrer que cette force de traction horizontale est accompagnée d'une force verticale qui tend à repousser l'aimant vers le haut.
Ce phénomène trouve une application pratique très intéressante: la sustentation magnétique.
Revenons à notre échelle et supposons que, à un instant donné, le centre du pôle N de l'aimant passe au-dessus du conducteur 2 (Fig. 33-31).
Figure 33-31 La tension induite dans le conducteur 2 est maximale à l'instant où le conducteur se trouve au centre de l'aimant. Si l'aimant se déplace lentement, il se trouve encore au-dessus du conducteur 2 lorsque le courant dans celui-ci atteint sa valeur crête.
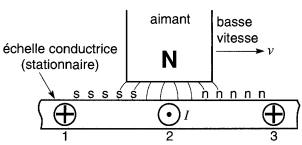
Le champ magnétique balayant ce conducteur y induit une tension qui est alors maximale.
Si l'aimant se déplace lentement, le courant induit dans ce conducteur atteint sa valeur maximale en même temps que la tension.
Ce courant, revenant par les conducteurs 1 et 3, crée des pôles magnétiques nnn et sss comme l'indique la figure.
On constate alors que, selon la loi de l'attraction et de la répulsion, la partie avant de l'aimant est repoussée vers le haut et que la partie arrière est attirée vers le bas.
Comme la distribution des pôles nnn et sss est symétrique par rapport au centre de l'aimant, les forces verticales d'attraction et de répulsion sont égales et la force résultante est nulle; il ne reste donc que la force de traction horizontale.
Supposons maintenant que l'aimant se déplace très rapidement.
À cause de l'inductance des conducteurs, le courant dans le conducteur 2 atteint sa valeur maximale une fraction de seconde après le maximum de tension induite.
Par conséquent, lorsque le courant dans le conducteur 2 est maximal, l'aimant se trouve déjà à une certaine distance en avant de ce conducteur (Fig. 33-32).
Figure 33-32 Lorsque l'aimant se déplace très rapidement, il se trouve entre les conducteurs 2 et 3 lorsque le courant dans le conducteur 2 atteint sa valeur crête.
Le courant, revenant par les conducteurs 1 et 3, crée encore des pôles nnn et sss comme auparavant ; cependant, le pôle N de l'aimant se trouve maintenant entièrement au-dessus d'un pôle nnn et il en résulte une force verticale importante qui repousse l'aimant mobile vers le haut.
C'est le principe de la sustentation magnétique.
La sustentation magnétique est mise à profit dans certains trains ultra-rapides qui glissent sur un coussin magnétique plutôt que sur des roues.
L'aimant fixé en dessous du train se déplace au-dessus d'une surface conductrice plane où sont induits des courants de Foucault, de la même façon que dans notre échelle.
Remarquer que la force de sustentation est toujours accompagnée d'une force de freinage horizontale qui doit être évidemment vaincue par le moteur propulsant le train.
La Fig. 33-29b montre les électro-aimants qui assurent la sustentation d'un wagon pesant plusieurs tonnes.
Résumé
Dans cette section sur le moteur asynchrone triphasé, nous nous sommes familiarisés avec sa construction, son principe de fonctionnement et ses propriétés de base.
Nous avons vu que le moteur comprend essentiellement un stator fixe et un rotor tournant, portant tous deux un bobinage triphasé.
Dans le moteur à rotor bobiné, le rotor est constitué d'un bobinage triphasé dont les trois bornes sont accessibles à travers un ensemble de bagues et de balais. Cet enroulement est court-circuité en fonctionnement normal.
Le rotor du moteur à cage d'écureuil est beaucoup plus simple. Il est constitué d'un ensemble de barres conductrices court-circuitées à leurs deux extrémités. La cage d'écureuil ainsi formée se comporte comme un bobinage triphasé en court-circuit.
Nous avons aussi expliqué comment sont construits les enroulements imbriqués du stator et du rotor.
Nous avons vu comment le bobinage triphasé du stator parcouru par trois courants déphasés de 120 degrés produit un champ tournant dans l'entrefer.
La vitesse de rotation de ce champ tournant ou vitesse synchrone est imposée par la fréquence de la source et le nombre de paires de pôles que comporte chaque phase.
Lorsque le rotor tourne à une vitesse inférieure à la vitesse synchrone, le champ tournant induit dans le rotor une tension dont la fréquence dépend de l'écart de vitesse relative ou glissement entre le champ tournant et le rotor.
Cette tension induite provoque la circulation de courants dans les conducteurs du rotor, et donc de forces qui ensemble produisent le couple moteur.
PROBLÈMES
Niveau pratique
33-1 Quelles sont les parties principales d'un moteur asynchrone?
33-2 Comment le champ tournant est-il produit dans le moteur asynchrone triphasé?
33-3 Si l'on double le nombre de pôles sur le stator d'un moteur asynchrone, sa vitesse synchrone doublera-t-elle?
33-4 Pourquoi doit-on éviter de maintenir bloqué le rotor d'un gros moteur asynchrone alimenté à tension nominale?
33-5 Pourquoi le rotor d'un moteur asynchrone tourne-t-il moins vite que le champ tournant?
33-6 Comment varient la vitesse et le courant du rotor d'un moteur asynchrone quand la charge mécanique augmente?
33-7 Y a-t-il un inconvénient à utiliser un moteur asynchrone de 25 kW pour entraîner une charge de 10 kW? Pourquoi?
33-8 Nommer deux avantages du moteur asynchrone à rotor bobiné par rapport au moteur à cage d'écureuil.
33-9 La valeur et la fréquence de la tension induite dans le rotor d'un moteur asynchrone diminuent à mesure qu'il accélère.
Expliquer.
33-10 Un moteur asynchrone triphasé possédant 20 pôles est alimenté par une source de 600 V, 60 Hz.
a) Quelle est la vitesse synchrone du moteur?
b) Est-ce que cette vitesse change lorsque la tension diminue de moitié?
33-11 Dans le problème 33-10, combien de pôles y a-t-il par phase?
33-12 Quelles sont les valeurs approximatives des courants de démarrage, de pleine charge et à vide d'un moteur asynchrone triphasé de 150 HP, 575 V?
33-13 Dessiner le spectre du champ magnétique à l'intérieur d'un moteur asynchrone triphasé à 12 pôles.
33-14 Comment peut-on changer le sens de rotation d'un moteur asynchrone? Niveau intermédiaire
33-15 a) Quelle est la vitesse synchrone d'un moteur asynchrone triphasé à 12 pôles alimenté par une source de tension à 60 Hz?
b) Calculer sa vitesse nominale si son glissement en pleine charge est de 6 %.
33-16 Un moteur asynchrone triphasé à 6 pôles est alimenté par une source triphasée à 60 Hz. La tension induite dans les barres du rotor est de 4 V lorsque celui-ci est bloqué.
En supposant que le flux mutuel est constant, calculer la valeur et la fréquence de la tension induite:
a) à 300 r/min b) à 1000 r/min c) à 1500 r/min
33-17 a) Quels sont les courants approximatifs de pleine charge, de démarrage et à vide d'un moteur asynchrone triphasé de 75 kW, 4000 V, 900 r/min?
b) Calculer la vitesse et le couple nominal sachant qu'à pleine charge le glissement est de 2 %.
33-18 Un moteur asynchrone triphasé de 75 HP a un rendement de 91 % et un FP de 83 % à pleine charge. Quel est son courant nominal si la tension est de 440 V?
33-19 Une tension de 240 V apparaît entre les bagues d'un moteur à rotor bobiné lorsque le rotor est au repos, à circuit ouvert.
Sachant que la machine a 6 pôles et qu'elle est alimentée à une fréquence de 60 Hz calculer la valeur et la fréquence de la tension entre les bagues si le rotor est entraîné par un autre moteur:
a) à 600 r/min dans le même sens que le champ tournant
b) à 900 r/min dans le même sens que le champ tournant
c) à 3600 r/min dans le sens contraire à celui du champ tournant
33-20 a) Sur la Fig. 33-10, quelles sont les valeurs de Ia, Ib et Ic pour un angle de 150°?
b) Déterminer le sens réel des courants à cet instant et calculer la valeur et le sens des FMM développées par les enroulements.
c) La FMM résultante agit-elle bien dans une direction située entre les positions des FMM aux instants 3 et 4?
33-21 Un stator triphasé possédant 72 encoches aune vitesse synchrone de 900 r/min sur un réseau à 60 Hz.
Calculer le nombre de bobines par groupe ainsi que le pas approximatif des bobines, sachant que l'enroulement est du type imbriqué.
Faire le diagramme des connexions en suivant les étapes a à f de la Fig. 33-23.
33-22 Le stator triphasé de la Fig. 33-26 possède 4 pôles et son alésage est de 250 mm. La densité de flux maximale par pôle est de 0,7 T et l'épaisseur de l'empilage de tôles du rotor est de 200 mm.
a) À quelle vitesse (en m/s) le flux se déplace-t-il à la surface du rotor si le stator est alimenté par une source à 60 Hz?
b) Calculer la tension crête induite dans les barres du rotor.
c) Calculer la longueur d'un pas polaire.
33-23 Un moteur asynchrone triphasé à 10 pôles, 4000 V tire de la ligne d'alimentation un courant de 385 A et une puissance active de 2344 kW lorsqu'il fonctionne à pleine charge sur un réseau à 60 Hz.
Le stator est raccordé en étoile et la résistance entre deux bornes extérieures est de 0,10Ω.
Les pertes totales dans le fer sont de 23,4 kW et une mesure précise indique que la vitesse de rotation à pleine charge est de 709,2 r/min. Les pertes par friction et par ventilation sont de 12 kW.
Calculer:
a) le facteur de puissance du moteur
b) la puissance active fournie au rotor à pleine charge
c) les pertes Joule dans le rotor d) la puissance mécanique (en kW) et le couple (en kN.m) développés par le moteur. Quel est son rendement?
33-24 Si l'on augmente la résistance du rotor d'un moteur asynchrone, quel est l'effet (augmentation ou diminution) sur:
a) le couple de démarrage
b) le courant de démarrage
c) la vitesse de pleine charge
d) le rendement
e) le facteur de puissance
f) la température
33-25 Expliquer le principe de la sustentation magnétique.
Niveau avancé
33-26 Dans la Fig. 33-7, l'aimant permanent a une largeur de 100 mm et il se déplace à une vitesse de 30 m/s.
Sachant que la densité de flux est de 0,5 T et que la résistance effective de la barre en dessous de l'aimant est de 1 mΩ, calculer le courant I, ainsi que la force.
33-27 Si, dans la Fig. 33-7, l'échelle subit une force de 20 N, quelle est la force de freinage produite sur l'aimant?
33-28 Un moteur triphasé à rotor bobiné de 3730 kW, 6000V, 60 Hz, tourne à une vitesse de 594 r/min.
Calculer la valeur approximative des pertes Joule dans le rotor.
33-29 Un moteur triphasé à rotor bobiné de 3730 kW, 6000V. 60 Hz possède les caractéristiques suivantes:
1. résistance entre les bornes du stator: 0,112Ω à 17°C
2. résistance entre les bornes du rotor à circuit ouvert: 0,0073Ω à 17 °C
3. tension induite entre les bornes du rotor à circuit ouvert, le rotor étant immobile: 1600 V
4. tension aux bornes du stator: 6000 V
5. courant à vide, par phase: 100 A
6. puissance active absorbée par le moteur, à vide : 91 kW
7. pertes par friction et par ventilation: 51 kW
8. pertes dans le fer du stator: 39 kW
9. courant de démarrage par phase: 1800 A
10. puissance active absorbée au démarrage : 2207 kW
Calculer:
a) la résistance par phase du rotor et du stator à une température de 75 °C (supposer des connexions en étoile)
b) la tension et la fréquence induites dans le rotor lorsqu'il tourne à 200 r/min et à 594 r/min
c) la puissance réactive requise pour créer le champ tournant
d) les pertes Joule dans le stator lorsque le moteur tourne à vide (à 75 °C)
e) la puissance fournie au rotor à vide
f) la vitesse du rotor à vide
33-30 En se référant au moteur décrit au problème 33-29, calculer, lors du démarrage:
a) la puissance réactive absorbée par le moteur
b) les pertes Joule dans le stator
c) la puissance active fournie au rotor
d) la puissance mécanique développée
e) le couple développé
33-31 On désire faire un montage semblable à celui de la Fig. 33-20 afin que le moteur du problème 33-29 puisse tourner à une vitesse de 300 r/min tout en développant son couple nominal.
Calculer:
a) la valeur de la résistance par phase et la puissance totale dissipée
b) le courant au stator, par phase (approximativement)
33-32 Le train de la Fig. 33-29 se déplace à une vitesse de 200 km/h lorsque la fréquence est de 105 Hz.
En supposant le glissement négligeable, déterminer le pas polaire du moteur linéaire en millimètres.
33-33 Un moteur triphasé de 300 kW, 2,3 kV, 1780 r/min, 60 Hz entraîne un compresseur. Il possède un rendement de 92 % et un FP de 86 % lorsqu'il fonctionne à pleine charge.
Si la tension du réseau monte à 2,8 kV, quel sera l'effet (augmentation ou diminution) sur :
a) la puissance mécanique débitée par le moteur
b) la vitesse de rotation
c) le couple du moteur
d) le courant de pleine charge
e) le FP et le rendement
f) le couple de démarrage
g) le courant de démarrage
h) le couple de décrochage
i) la température
j) le flux par pôle
k) le courant d'excitation
33-34 On doit rebobiner le moteur décrit dans le problème 33-33 afin qu'il puisse fonctionner à la même vitesse sur un réseau triphasé à 575 V, 60 Hz.
Quels changements doit-on apporter:
a) au nombre de spires par bobine?
b) à la grosseur du fil des bobines?
c) au pas des bobines?
Réponses
10a) 360 r/min;
10b) non; 11) 20; 12) 900 A; 150 A; - 45 A;
15a) 600 r/min; 15b) 564 r/min;
16a) 3 V; 45 Hz;
16b) 0,67 V; 10 Hz; 16c) 1 V; 15 Hz; 17a) 15 A; 90 A; - 6 A;
17b) 882 r/min; 812 N'm; 18) 97,3 A; 19a) 120 V; 30 Hz;
19b) 60 V; 15 Hz;
19c) 960 V; 240 Hz; 20a) - 8,66 A; + 8,66 A; 0 A;
20b) phase A: 86,6 A;
phase B: 86,6 A; phase C: 0 A;
20c) oui; 21) 3; encoche 1 à encoche 8; 22a)
23,56 m/s;
22b) 3,3 V; 22c) 196,3 mm; 23a) 87,9%; 23b) 2300 kW;
23c) 34,5
kW; 23d) 2250 kW; 30,2 kN•m; 96%; 24a) augmente;
24b) diminue; 24c) diminue;
24d) diminue; 24e) augmente
24f) augmente; 26) 1500 A; 75 N; 27) 20 N; 28)
38 kW;
29a) 4,49 mit; 68,9 m4; 29b) 1067 V; 40 Hz; 16 V; 0,6 Hz;
29c) 1035
kvar; 29d) 2067 W; 29e) 50 kW; 29f) 599,92 r/min ;
30a) 18,6 Mvar; 30b) 670
kW; 30c) 1498 kW; 30d) 0;
30e) 23,8 kN•m; 31 a) 0,34 0; - 1900 kW 31b) - 390
A ;
32) 265 mm; 33a) inchangé; 33b) 1786 r/min (voir pages 510,511) ;
33d) augmente légèrement; 33f) augmente de 48%;
33g) augmente de 22%; 33h)
augmente de 48%;
33i) augmente légèrement; 33j) augmente de 22%;
33k)
augmente de plus de 22%; 34a) réduire le nombre de spires de 4 fois;
34b)
augmenter de 4 fois la grosseur des conducteurs; 34c) inchangé
![]()